- 首頁
- ACS 控制器到達頁
ACS Motion Control
極致運動控制
定義奈米級精度的智慧解決方案
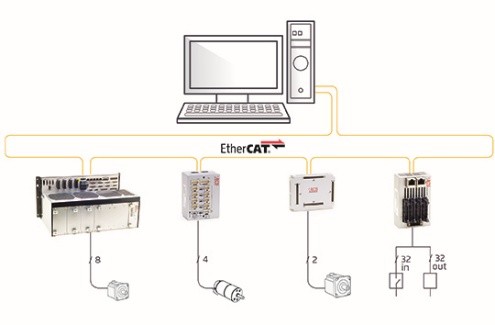
專為高階半導體與雷射加工設備設計,整合 EtherCAT 多軸同動技術,提供業界最強大的運算核心。

為什麼選擇 ACS?
EtherCAT 核心
基於 EtherCAT 總線架構,最高支援 64 軸同步控制,通訊週期可達 4kHz。
奈米級精度
獨家 ServoBoost™ 演算法,有效抑制擾動,將動態誤差降至奈米等級。
ACSPL+ 語言
強大的多工編程語言,內建 G-Code 支援與 API 函式庫,開發更靈活。

多軸輪廓運動模式
許多運動控制應用需要沿著多軸路徑進行協調運動,該路徑通常由一系列直線和圓弧段組成。 ACS 的分段運動功能可為多達 6 個軸提供此功能。它還包括先進的前瞻速度調整和最多 2 個軸的角落處理。數位輸出可輕鬆與運動段同步,從而實現對雷射、擠出頭和其他設備的無縫控制
- 使用最多 6 個軸的直線和圓弧段執行二維平面運動路徑
- 可使用 ACSPL+ 或 G -code進行編程
- 先進的前瞻演算法可實現彎道速度限制
- 靈活的幾何處理選項-圓角、分段混合、空中書寫(skywriting)
- 輕鬆將事件(數位輸出)與運動片段同步
降低目標頻率下的運動誘導共振
輸入整形是一種先進的點對點運動輪廓演算法,它透過最大限度地減少目標頻率下的運動誘導共振,可以提高精密運動系統的吞吐量。輸入整形最適用於高頻共振的應用,例如測量頭懸臂安裝在運動平台上的情況。


提高快速短時移動的吞吐量和準確性
MotionBoost 是一種先進的點對點運動輪廓演算法,可提高精密運動平台在快速短時運動(例如 50 毫秒以內)的表現。半導體檢測等應用非常適合使用該演算法。與 ServoBoost 等其他先進的 ACS 伺服控制演算法結合使用時,效能提升效果更佳。
- 透過提高速度和加速度來提高吞吐量
- 降低寬頻率範圍內的運動誘發共振
性能指標
產品系列

EtherCAT控制主機
高性能 EtherCAT 主站控制器 專為大規模自動化產線設計的旗艦級運算核心,支援高達 64 軸同步控制與 5kHz 網路循環速率,確保複雜系統的穩定與精準。
了解更多 →
EtherCAT控制主機+內建驅動器
緊湊型全功能控制驅動一體機 (Control Module) 將 EtherCAT 主站與多軸驅動器整合於單一機殼,以最小佔地面積提供 20kHz 的伺服更新率,實現單機多軸的極致控制。
了解更多 →

EtherCAT控制器(只能搭ACS主機)
ACS 專用高性能多軸驅動系統 專為 ACS 主站架構優化的驅動節點,完美整合 ServoBoost™ 等原廠獨家演算法,提供超越標準協議的頻寬與動態響應。
了解更多 →
EtherCAT控制器(可搭配他牌主機)
標準 DS402 協議 EtherCAT 驅動器 具備高度相容性的開放式伺服驅動器,可無縫對接 Beckhoff、Omron 等第三方 EtherCAT 主站,靈活適應各種系統架構。
了解更多 →



應用領域

晶圓檢測 AOI

雷射微加工

FPD 面板製程
