
提供最適合您的方案
WE PROVIDE YOU THE BEST SOLUTION
運動控制系統及元件
-
 運動控制器+軸卡
運動控制器+軸卡
-
 步進/伺服驅動器
步進/伺服驅動器
-
 伺服馬達
伺服馬達
步進馬達
音圈馬達
線性馬達
直驅馬達 -
 回授元件
回授元件
光學尺
磁性尺
Linear Encoder
編碼器
顯示器 -
 空氣軸承
空氣軸承
Air Bearing
Air conveyor -
 多孔性陶瓷真空吸盤
多孔性陶瓷真空吸盤
Porous Ceramic Chuck Table -
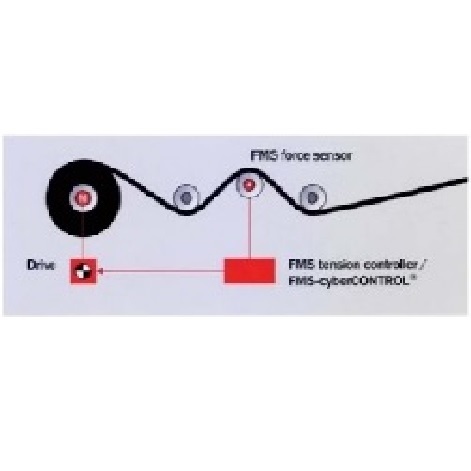 FMS 張力控制器
FMS 張力控制器
張力放大器
張力 sensor -
 HarmonicDrive® 諧波減速機
HarmonicDrive® 諧波減速機
DirectDrive Motor 直驅電動機
Rotary Actuator 旋轉執行元件 -
 減速機 / 齒輪齒排
減速機 / 齒輪齒排
-
 聯軸器 / 免鍵式軸襯
聯軸器 / 免鍵式軸襯
-
 定位平台 (滑台) /
定位平台 (滑台) /
Stage / X-Y-Z Table
Theta Hybrid Hexapod
史都華平台 -
 ALIO Hybrid Hexapod
ALIO Hybrid Hexapod
史都華平台 -
 次系統設備(客製)
次系統設備(客製)
-
 電動缸 / 千斤頂 /
電動缸 / 千斤頂 /
升降器 / 線性致動器 -
 軸承 / 線性軸承 /
軸承 / 線性軸承 /
線性滑台 -
 線性滑軌
線性滑軌
-
 固態繼電器SSR
固態繼電器SSR
-
 Karl Klein 鼓風機
Karl Klein 鼓風機
-
 特殊環境用--
特殊環境用--
防爆、防水、
真空、低溫、重載 -
 應用案例影片
應用案例影片
-
 庫存出清
庫存出清
Argus(GPM、GEM)
|
PDF下載 |
|


CONTROL MODES
• Profile Position-Velocity-Torque, Interpolated Position, Homing
• Indexer, Point-to-Point, PVT
• Camming, Gearing
COMMAND INTERFACE
• CANopen
• ASCII and discrete I/O
• Stepper commands
• ±10V position/velocity/torque command
• PWM velocity/torque commandf
• Master encoder (Gearing/Camming)
COMMUNICATIONS
• CANopen
• RS-232
• RS-422
FEEDBACK
Incremental
• Digital quad A/B encoder
• Analog Sin/Cos encoder
• Panasonic Incremental A
• Aux. encoder / encoder out
Absolute
• SSI
• EnDat 2.1 & 2.2
• Absolute A
• Tamagawa Absolute A
• Panasonic Absolute A Format
• Sanyo Denki Absolute A
• BiSS (B&C)
Other
• Digital Halls
• Resolver (-R model)
I/O DIGITAL
• 6 High-speed inputs
• 4 Opto-isolated inputs
• 1 Motor over-temp input
• 4 High-speed outputs
• 4 Opto-isolated outputs
• 1 Opto-isolated motor brake output
I/O ANALOG
• 1 Reference input, 12-bit
SAFE TORQUE OFF (STO)
• SIL 3, Category 3, PL d
DIMENSIONS: IN [MM]
• 3.10 x 2.40 x 0.92 [78.7 x 60.1 x 23.4]
|
Model |
VDC |
IC |
IP |
|
GPM-055-60 |
9-55 |
30 |
60 |
|
GPM-055-60-R |
9-55 |
30 |
60 |
|
GPM-090-60 |
14-90 |
30 |
60 |
|
GPM-090-60-R |
14-90 |
30 |
60 |
DESCRIPTION
GPM sets new levels of performance, connectivity, and flexibility.
The GPM operates as an CAN node using the CANopen protocol of
DSP-402 for motion control devices. Supported modes include:
Profile Position-Velocity-Torque, Interpolated Position Mode (PVT),
and Homing. A wide range of absolute encoders are supported.
Both isolated and high-speed non-isolated I/O are provided.
For safety critical applications, redundant power stage enable inputs
can be employed.
原廠網址: https://www.copleycontrols.com/wp-content/uploads/2018/02/GPM-ds.pdf

Argus PLUS Module EtherCAT GEM

CONTROL MODES
• Cyclic Synchronous Position-Velocity-Torque (CSP, CSV, CST)
• Profile Position-Velocity-Torque, Interpolated Position, Homing
• Indexer, Point-to-Point, PVT
• Camming, Gearing
• Position, Velocity, Torque
COMMAND INTERFACE
• CANopen application protocol over EtherCAT (CoE)
• ASCII and discrete I/O
• Stepper commands
• ±10V position/velocity/torque
• PWM velocity/torque commandf
• Master encoder (Gearing/Camming)
COMMUNICATIONS
• EtherCAT
• RS-232
• RS-422
FEEDBACK
Incremental
• Digital quad A/B encoder
• Analog sin/cos encoder
• Panasonic Incremental A
• Aux. encoder / encoder out
Absolute
• SSI
• EnDat 2.1 & 2.2
• Absolute A
• Tamagawa Absolute A
• Panasonic Absolute A Format
• Sanyo Denki Absolute A
• BiSS (B&C)
Other
• Digital Halls
• Resolver (-R model)
I/O DIGITAL
• 6 High-speed inputs
• 1 Motor over-temp input
• 4 Opto-isolated inputs
• 4 High-speed output
• 4 Opto-isolated outputs
• 1 Opto-isolated motor brake output
I/O ANALOG
• 1 Reference input, 12-bit
SAFE TORQUE OFF (STO)
• SIL 3, Category 3, PL d
DIMENSIONS: IN [MM]
• 3.10 x 2.40 x 0.92 [78.7 x 60.1 x 23.4]
|
Model |
VDC |
IC |
IP |
|
GEM-055-60 |
9-55 |
30 |
60 |
|
GEM-055-60-R |
9-55 |
30 |
60 |
|
GEM-090-60 |
14-90 |
30 |
60 |
|
GEM-090-60-R |
14-90 |
30 |
60 |
DESCRIPTION
GEM sets new levels of performance, connectivity, and flexibility.
CANopen application protocol over EtherCAT (CoE) communication
provides a widely used cost-effective industrial bus.
A wide range of absolute encoders are supported.
Both isolated and high-speed non-isolated I/O are provided.
For safety critical applications, redundant power stage enable inputs
can be employed.
原廠網址: https://www.copleycontrols.com/wp-content/uploads/2018/02/GEM-ds.pdf