
提供最適合您的方案
WE PROVIDE YOU THE BEST SOLUTION
運動控制系統及元件
-
 運動控制器+軸卡
運動控制器+軸卡
-
 步進/伺服驅動器
步進/伺服驅動器
-
 伺服馬達
伺服馬達
步進馬達
音圈馬達
線性馬達
直驅馬達 -
 回授元件
回授元件
光學尺
磁性尺
Linear Encoder
編碼器
顯示器 -
 空氣軸承
空氣軸承
Air Bearing
Air conveyor -
 多孔性陶瓷真空吸盤
多孔性陶瓷真空吸盤
Porous Ceramic Chuck Table -
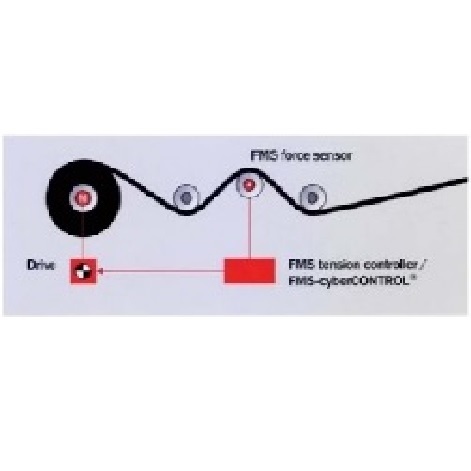 FMS 張力控制器
FMS 張力控制器
張力放大器
張力 sensor -
 HarmonicDrive® 諧波減速機
HarmonicDrive® 諧波減速機
DirectDrive Motor 直驅電動機
Rotary Actuator 旋轉執行元件 -
 減速機 / 齒輪齒排
減速機 / 齒輪齒排
-
 聯軸器 / 免鍵式軸襯
聯軸器 / 免鍵式軸襯
-
 定位平台 (滑台) /
定位平台 (滑台) /
Stage / X-Y-Z Table
Theta Hybrid Hexapod
史都華平台 -
 ALIO Hybrid Hexapod
ALIO Hybrid Hexapod
史都華平台 -
 次系統設備(客製)
次系統設備(客製)
-
 電動缸 / 千斤頂 /
電動缸 / 千斤頂 /
升降器 / 線性致動器 -
 軸承 / 線性軸承 /
軸承 / 線性軸承 /
線性滑台 -
 線性滑軌
線性滑軌
-
 固態繼電器SSR
固態繼電器SSR
-
 Karl Klein 鼓風機
Karl Klein 鼓風機
-
 特殊環境用--
特殊環境用--
防爆、防水、
真空、低溫、重載 -
 應用案例影片
應用案例影片
-
 庫存出清
庫存出清
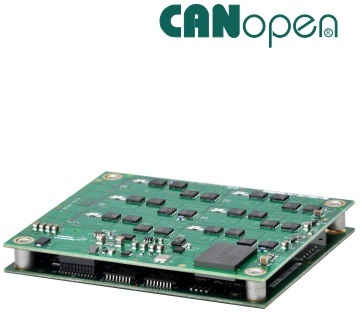
M-Series Multiaxis (MP3、ME3、MP4、ME4)
|
PDF下載 |
|||

Servo Control Modes
• Profile Position-Velocity, Interpolated Position, Homing
• Indexer, Point-to-Point, PVT
• Camming, Gearing
• Position/Velocity/Torque
Stepper Control Modes
• Cyclic Synchronous Position (CSP)
• Profile Position-Velocity-Torque, Interpolated Position, Homing
• Position (Microstepping)
• Position/Velocity/Torque (Servo Mode)
• Indexer, Point-to-Point, PVT
• Camming, Gearing
Command Interface
• CANopen
• ASCII and discrete I/O
• Stepper commands
• ±10V or PWM velocity/torque (servo mode)
• Master encoder (Gearing/Camming)
Communications
• CANopen
• RS-232
Feedback
• Digital quad A/B/X encoder
• Absolute encoders
• Sin/Cos encoders
• Digital Halls
I/O Digital
• 19 HS inputs
• 3 MOSFET outputs
• 6 CMOS HS outputs
I/O Analog
• 3 ±10V inputs
I/O SPI
• 1 HS input
• 3 CMOS HS outputs
Dimensions: mm [in]
• 101.6 x 85.1 x 21 [4.0 x 3.35 x 0.80]
|
Model |
VDC |
IC |
IP |
|
MP3-090-10 |
14-90 |
5 |
10 |
DESCRIPTION
Multinet MP3 is a 3-axis, high-performance, DC powered drive for position,
velocity, and torque control of stepper and motors via CANopen.
Using advanced FPGA technology, the MP3 provides a significant reduction
in the cost per node in multi-axis CANopen systems. Each of the three axes
in the MP3 operate as CANopen nodes under CiA-402 for motion control devices.
Supported modes include: Profile Position-Velocity, Interpolated Position Mode (PVT),
and Homing. Servo mode of steppers allows CANopen or digital PWM control of
position/ velocity/torque. In microstepping mode stepper command pulses and
master encoder for camming or gearing is supported.
Nineteen high-speed digital inputs with programmable functions are provided.
There are six CMOS high-speed outputs. Three MOSFET outputs that are 24V
compatible can power motor brakes. An SPI port is provided with one high-speed
input and three high-speed digital outputs. If not used for SPI, the input and outputs
are programmable for other functions. An RS-232 serial port provides a connection to
Copley’s CME2 software for commissioning, firmware upgrading, and saving configurations
to flash memory. The CANopen port is optically isolated. Drive power is transformer-isolated
DC from regulated or unregulated power supplies. An AuxHV input is provided for “keep-alive”
operation permitting the drive power stage to be completely powered down without losing
position information, or communications with the control system.
原廠網址: https://www.copleycontrols.com/wp-content/uploads/2018/02/MP3-ds.pdf

M3 3-Axis Module EtherCAT ME3

Servo Motor Control Modes
• Cyclic Synchronous Position-Velocity-Torque (CSP, CSV, CST)
• Profile Position-Velocity-Torque, Interpolated Position, Homing
• Indexer, Point-to-Point, PVT
• Camming, Gearing
• Position, Velocity, Torque
Stepper Motor Control Modes
• Cyclic Synchronous Position (CSP)
• Profile Position-Velocity-Torque, Interpolated Position, Homing
• Position/Velocity/Torque (Servo Mode)
• Position (Microstepping)
• Indexer, Point-to-Point, PVT
• Camming, Gearing
Command Interface
• CANopen application protocol over EtherCAT (CoE)
• ASCII and discrete I/O
• Stepper commands
• ±10V position/velocity/torque
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
Communications
• EtherCAT
• RS-232
Feedback
• Digital quad A/B/X encoder
• Absolute encoders
• Sin/Cos encoder
• Digital Halls
I/O Digital
• 19 HS inputs
• 3 MOSFET outputs
• 6 CMOS HS outputs
I/O Analog
• 3 ±10V inputs
I/O SPI
• 1 HS input
• 3 CMOS HS outputs
Dimensions: mm [in]
• 101.6 x 85.1 x 21 [4.0 x 3.35 x 0.80]
|
Model |
VDC |
IC |
IP |
|
ME3-090-10 |
14-90 |
5 |
10 |
DESCRIPTION
The ME3 is a 3-axis, high-performance, DC powered drive for position, velocity,
and torque control of servo and stepper motors via EtherCAT. Using advanced
FPGA technology, the ME3 provides a significant reduction in the cost per node
in multi-axis EtherCAT systems. Each of the three axes in the ME3 operate as
EtherCAT axes under DSP-402 for motion control devices. Supported modes include:
Cyclic Synchronous Position/Velocity/Torque, Profile Position-Velocity, Interpolated
Position Mode (PVT), and Homing. Servo mode of steppers allows EtherCAT or digital
PWM control of position/ velocity/torque. In microstepping mode stepper command
pulses and master encoder for camming or gearing is supported.
Nineteen high-speed digital inputs with programmable functions are provided.
There are six CMOS high-speed outputs. Three MOSFET outputs that are 24V compatible
can power motor brakes. An SPI port is provided with one high-speed input and three
high-speed digital outputs. If not used for SPI, the input and outputs are programmable
for other functions. An RS-232 serial port provides a connection to Copley’s CME2 software
for commissioning, firmware upgrading, and saving configurations to flash memory.
The EtherCAT port is optically isolated. Drive power is transformer-isolated DC from regulated
or unregulated power supplies. An AuxHV input is provided for “keep-alive” operation permitting
the drive power stage to be completely powered down without losing position information,
or communications with the control system.
原廠網址: https://www.copleycontrols.com/wp-content/uploads/2018/02/ME3-ds.pdf

M4 4-Axis Module CANopen MP4
Servo Control Modes
• Profile Position-Velocity, Interpolated Position, Homing
• Indexer, Point-to-Point, PVT
• Camming, Gearing
• Position/Velocity/Torque
Stepper Control Modes
• Position (Microstepping)
• Position/Velocity/Torque (Servo Mode)
• Indexer, Point-to-Point, PVT
• Camming, Gearing
Command Interface
• CANopen
• ASCII and discrete I/O
• Stepper commands
• Master encoder (Gearing/Camming)
Communications
• CANopen
• RS-232
Feedback
• Digital quad A/B/X encoder
I/O Digital
• 24 HS inputs
• 8 MOSFET outputs
I/O SPI
• 1 HS input
• 4 HS outputs
Dimensions: mm [in]
• 101.6 x 76.2 x 20.83 [4.00 x 3.00 x 0.83]
|
Model |
VDC |
IC |
IP |
|
MP4-055-03 |
14-55 |
3 |
3 |
DESCRIPTION
The MP4 is a four-axis, high-performance, DC powered drive for control of
stepper or servo motors via CANopen. Each axis is configurable to drive a stepper,
brushless, or brush motor. Using advanced FPGA technology, the MP4 provides a
significant reduction in the cost per node by combining stepper and servo motors
into a compact package. Each axis in the MP4 operates as an CANopen node under
CiA-402 for motion control devices. Supported modes include:
Cyclic position/velocity/torque, Profile Position-Velocity, Interpolated Position Mode (PVT),
and Homing. Servo mode allows position/velocity/torque control. Servo mode allows
CANopen or digital PWM control of position/velocity/torque. In microstepping mode
stepper command pulses and master encoder for camming or gearing is supported.
Twenty-four high-speed digital inputs with programmable functions are provided.
There are eight MOSFET outputs that are 24V compatible.
An SPI port is provided with one high-speed input and four high-speed digital outputs.
If not used for SPI, the input and outputs are programmable for other functions.
An RS-232 serial port provides a connection to Copley’s CME2 software for commissioning,
firmware upgrading, and saving configurations to flash memory.
The CANopen port is optically isolated. Drive power is transformer-isolated DC from regulated
or unregulated power supplies. An AuxHV input is provided for “keep-alive” operation permitting
the drive power stage to be completely powered down without losing position information,
or communications with the control system.
原廠網址: https://www.copleycontrols.com/wp-content/uploads/2018/02/MP4-ds.pdf

M4 4-Axis Module EtherCAT ME4

Servo Motor Control Modes
• Cyclic Synchronous Position-Velocity-Torque (CSP, CSV, CST)
• Profile Position-Velocity-Torque, Interpolated Position, Homing
• Indexer, Point-to-Point, PVT
• Camming, Gearing
• Position, Velocity, Torque
Stepper Motor Control Modes
• Cyclic Synchronous Position (CSP)
• Profile Position-Velocity-Torque, Interpolated Position, Homing
• Position/Velocity/Torque (Servo Mode)
• Position (Microstepping)
• Indexer, Point-to-Point, PVT
• Camming, Gearing
Command Interface
• CANopen application protocol over EtherCAT (CoE)
• ASCII and discrete I/O
• Stepper commands
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
Communications
• EtherCAT
• RS-232
Feedback
• Digital quad A/B/X encoder
• Digital Halls
I/O Digital
• 24 HS inputs
• 8 MOSFET outputs
I/O SPI
• 1 HS input
• 4 CMOS HS outputs
Dimensions: mm [in]
• 101.6 x 85.1 x 21 [4.0 x 3.35 x 0.80]
|
Model |
VDC |
IC |
IP |
|
ME4-055-03 |
14-55 |
3 |
3 |
DESCRIPTION
The ME4 is a four-axis, high-performance, DC powered drive for control of
stepper or servo motors via EtherCAT. Each axis is configurable to drive a stepper,
brushless, or brush motor. Using advanced FPGA technology, the ME4 provides a
significant reduction in the cost per node by combining stepper and servo motors
into a compact package. Each axis in the ME4 operates as an EtherCAT node under
DSP-402 for motion control devices.
Supported modes include: Cyclic position/velocity/torque, Profile Position-Velocity,
Interpolated Position Mode (PVT), and Homing.
Servo mode of steppers allows position/velocity/torque control. Servo mode allows
EtherCAT or digital PWM control of position/velocity/torque.
In microstepping mode stepper command pulses and master encoder for camming or
gearing is supported.
Twenty-four high-speed digital inputs with programmable functions are provided.
There are eight mosfet outputs that are 24V compatible. An SPI port is provided with
one high-speed input and four high-speed digital outputs. If not used for SPI, the input
and outputs are programmable for other functions. An RS-232 serial port provides a
connection to Copley’s CME2 software for commissioning, firmware upgrading, and
saving configurations to flash memory. The EtherCAT port is magnetically isolated.
Drive power is transformer-isolated DC from regulated or unregulated power supplies.
An AuxHV input is provided for “keep-alive” operation permitting the drive power stage
to be completely powered down without losing position information, or communications
with the control system.