
提供最適合您的方案
WE PROVIDE YOU THE BEST SOLUTION
運動控制系統及元件
-
 運動控制器+軸卡
運動控制器+軸卡
-
 步進/伺服驅動器
步進/伺服驅動器
-
 伺服馬達
伺服馬達
步進馬達
音圈馬達
線性馬達
直驅馬達 -
 回授元件
回授元件
光學尺
磁性尺
Linear Encoder
編碼器
顯示器 -
 空氣軸承
空氣軸承
Air Bearing
Air conveyor -
 多孔性陶瓷真空吸盤
多孔性陶瓷真空吸盤
Porous Ceramic Chuck Table -
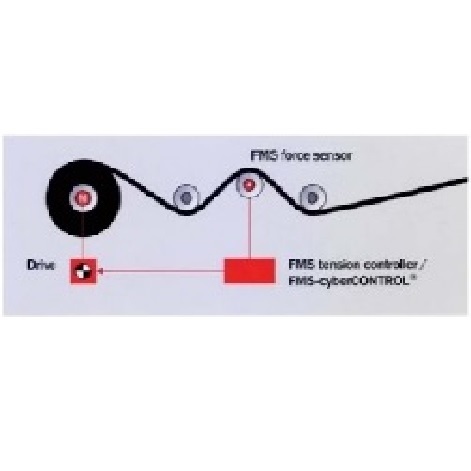 FMS 張力控制器
FMS 張力控制器
張力放大器
張力 sensor -
 HarmonicDrive® 諧波減速機
HarmonicDrive® 諧波減速機
DirectDrive Motor 直驅電動機
Rotary Actuator 旋轉執行元件 -
 減速機 / 齒輪齒排
減速機 / 齒輪齒排
-
 聯軸器 / 免鍵式軸襯
聯軸器 / 免鍵式軸襯
-
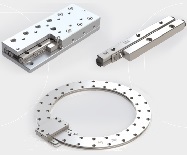
 定位平台 (滑台) /
定位平台 (滑台) /
Stage / X-Y-Z Table
Theta Hybrid Hexapod
史都華平台 -
 ALIO Hybrid Hexapod
ALIO Hybrid Hexapod
史都華平台 -
 次系統設備(客製)
次系統設備(客製)
-
 電動缸 / 千斤頂 /
電動缸 / 千斤頂 /
升降器 / 線性致動器 -
 軸承 / 線性軸承 /
軸承 / 線性軸承 /
線性滑台 -
 線性滑軌
線性滑軌
-
 固態繼電器SSR
固態繼電器SSR
-
 Karl Klein 鼓風機
Karl Klein 鼓風機
-
 特殊環境用--
特殊環境用--
防爆、防水、
真空、低溫、重載 -
 應用案例影片
應用案例影片
-
 庫存出清
庫存出清
Stepnet 閉迴路步進驅動器 (STX、STP、STM、STL、SPM、SEM、SP2、SE2、TP2、TEL、TE2、SP4、SE4、R52)
|
PDF下載 |
||||||
Stepnet步進驅動器閉迴路應用與測試報告
一、前言
一般說來, 步進驅動器控制模式為開迴路控制(步進馬達無回授, 步進驅動器接收上位控制
器的Pulse命令進行運動), 所以步進馬達在定位精度方面, 可能因下列兩主要因素造成定位失準:
1、步進馬達發生失步就會造成定位不準。
2、機構本身存在誤差(例如螺桿機構的Pitch誤差)。
二、Copley步進驅動器針對提高定位精度的解決方案
Copley Stepnet步進驅動器具備步進閉迴路功能, 只要在機構上加裝回授裝置(一般為線性光
學尺), Stepnet驅動器即會依據光學尺回授自動進行位置修正(即閉迴路功能)。
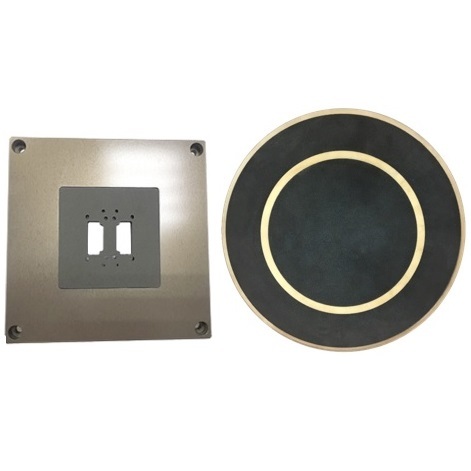
三、測試環境:
1、硬體:
(1).驅動器: Copley Stepnet STP-075-07
(2).步進馬達: LIN ENGINEERING 5718L-01 (NEMA23)
(3).光學尺: Renishaw RGH24Y (解析度0.1um)
(4).滑台: 螺桿導程(Pitch)5mm
2、軟體: Copley CME2 Ver7.0
3、測試硬體照片:

|
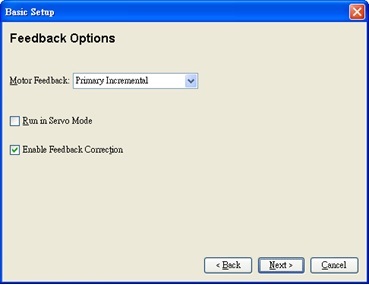
四、Stepnet閉迴路設定:
有兩種模式可選擇, 本次測試是使用修正
模式(Feedback Correction):
1、伺服模式(Servo Mode):
優點: 整定快
缺點: 靜止穩定性稍差
設定與調試較複雜
2、修正模式(Feedback Correction):
優點: 靜止穩定性佳
設定與調試較簡易
缺點: 整定較慢
|
 |
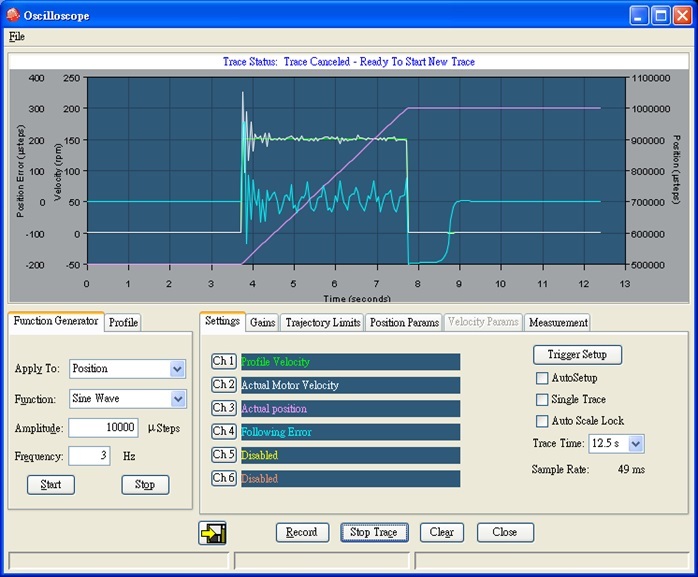
五、測試結果:
1、運動Profile:
(1).行程50mm(自50mm至100mm往返運動)
(2).轉速150rpm(即12.5mm/秒)
(3).加減速: 500rps^2(即2500mm/秒^2, 也就是加減速時間5ms)
2、自50mm至100mm運動波形:
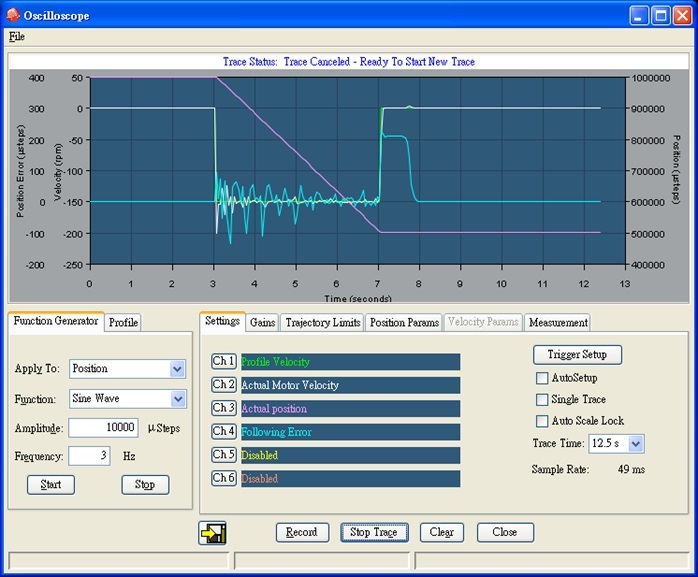
2、自100mm至50mm運動波形:
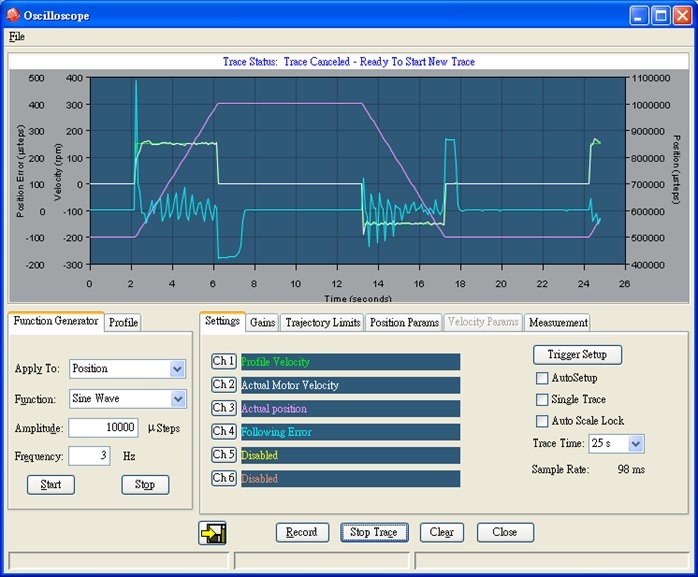
3、自50mm至100mm,再自100mm至50mm的運動波形:
Stepnet Panel

STP Panel

Control Modes
• Indexer, Point-to-Point, PVT
• Camming, Gearing
• Position, Velocity, Torque [Servo Mode]
• Position (Microstepping)
Command Interface
• CANopen
• ASCII and discrete I/O
• Stepper commands
• PWM velocity/torque command
• Master encoder [Gearing/Camming]
Communications
• CANopen
• RS-232
Feedback
• Digital Quad A/B encoder
I/O - Digital
• 12 inputs, 4 outputs
Dimensions: in [mm]
• 5.35 x 3.29 x 1.65 [135.9 x 83.5 x 41.8]
|
Model |
VDC |
IC |
IP |
|
STP-075-07 |
75 |
5 |
7 |
|
STP-075-10 |
75 |
10 |
10 |
DESCRIPTION
Stepnet is a stepping motor drive that combines CANopen
networking with 100% digital control of stepping motors. When
used with Copleys’ Accelnet™ and Xenus™ digital servo drives it
makes possible brushless, brush, and stepping motor control over
the same distributed network.
In Servo Mode, steppers fitted with encoders can be operated as
DC brushless servo motors in current, velocity or position modes.
This enables the motor to operate at higher RPM’s without stalling
which might occur in open-loop operation as a stepper.
Stepnet can operate as a stand-alone drive accepting incremental
position commands from step-motor controllers in Step/Direction
or CU/CD format, as well as A/B quadrature commands from a
master-encoder. Pulse to motor position ratio is programmable for
electronic gearing.
Set up is fast and simple using CME 2™ software operating under
Windows® and communicating with Stepnet via an RS-232 link.
CAN address selection is programmable in flash memory, by rotary
switch on the unit or via programmable digital inputs.
Stepnet operates as a Motion Control Device under the DSP-402
protocol of the CANopen DS-301 V4.01 (EN 50325-4) application
layer. DSP-402 modes supported include: Profile Position, Profile
Velocity, Interpolated Position Mode (PVT), and Homing Modes.
When operating in Servo Mode , Profile Torque mode is available.
The CAN bus interface is optically isolated from the drive circuits.
Profile Position mode does a complete motion index on command
with acceleration & deceleration, top speed, and distance
programmable.
In PVT (Position-Velocity-Time) mode, the controller sends out a
sequence of points each of which is an increment of a larger, more
complex move than that of a single index or profile. The drive
then uses cubic polynomial interpolation to “connect the dots”
such that the motor reaches each point (Position) at the specified
velocity (Velocity) at the prescribed time (Time). Homing mode is
configurable to work with a combination of limit and home switches
such that the drive moves the motor into a position that has an
absolute reference to some part of the machine. Profile Velocity
mode controls velocity, acceleration, and deceleration with no target
position defined.
There are twelve logic inputs. Input [IN1] is dedicated for drive
Enable. Eleven are programmable as limit or home switches,
stepper pulse inputs, A/B encoder, reset, CAN address, or motor
overtemperature sensor. There are four programmable logic outputs
for reporting a drive fault, operating a motor-mounted brake, or
other status indications. When operating as a node on a CANopen
network, the inputs and outputs can be read or controlled as
independent I/O points that are not linked to drive operation.
An Aux HV input is provided for “keep alive” power that preserves
the drive data (e.g. current position) and CANopen operation if +HV
has been removed as in an emergency-stop situation. This enables
the control system to monitor drive status and to enable an orderly
recovery without a full system reset, and homing of all axes.
Operation from transformer-isolated DC power supplies saves cost
in multi-axis systems.
Stepnet AC

STX

Control Modes
• Stand-alone: Pulse/Direction, CU/CD
• Indexer, Point-to-Point, PVT
• Master encoder (Gearing/Camming)
• Distributed driver (CANopen)
• Position, velocity, torque (Servo Mode)
Command Interface
• Step/Direction or CW/CCW inputs
• CANopen
• ASCII and discrete I/O
• ±10 Vdc velocity/torque (Servo Mode)
• PWM velocity/torque (Servo Mode)
• Digital inputs for indexer control
Communications
• CANopen
• RS232
Feedback
• Digital Quad A/B encoder
Differential or single-ended
• Secondary encoder / buffered encoder out
I/O - Digital
• 12 inputs, 4 outputs
Two high-speed inputs configurable as
differential or single-ended
Regen
• Internal
Dimensions: mm [in]
• 146 x 119 x 55 [5.73 x 4.7 x 2.17]
|
Model |
VAC |
IC |
IP |
|
STX-115-07 |
100-120 |
5 |
7 |
|
STX-230-07 |
200-240 |
5 |
7 |
Add “-H” to part number for factory-installed heatsink
DESCRIPTION
Stepnet AC is a compact, AC powered microstepping drive
for control of hybrid stepping motors. It operates as a
stand-alone driver taking Pulse/Direction or CW/CCW inputs
from an external controller or as a distributed drive on a
CANopen control network. In Servo mode a stepper with
encoder operates as a brushless servo motor in position,
velocity, or torque modes.
Indexing mode simplifies operation with PLC’s that use
outputs to select and launch indexes and inputs to read
back drive status. A single serial port on the PLC can send
ASCII data to multiple drives to change motion profiles as
machine requirements change.
CAN bus operation supports Profile Position, Profile Velocity,
Profile Torque, Interpolated Position, and Homing. Up to
127 Stepnet AC drives can operate on a single CAN bus
and groups of drives can be linked via the CAN so that they
execute motion profiles together.
Input command signals include ±10 Vdc (torque, velocity, in
Servo Mode), PWM/Polarity (torque, velocity in Servo Mode),
or Step/Direction and CU/CD (microstepping).
Separate ports are provided for differential or singleended
encoder connections. The active input is programmable.
Twelve digital inputs include a dedicated drive Enable,
motor overtemp switch, and 10 general purpose inputs.
Two of the high-speed inputs are programmable as differential
or single-ended.
Stepnet Module

STM Module

Control Modes
• Indexer, Point-to-Point, PVT
• Camming, Gearing
• Position, Velocity (Servo Mode)
• Position (Microstepping)
Command Interface
• CANopen
• ASCII and discrete I/O
• Stepper commands
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
• ±10V Position/Velocity/Torque command *
Communications
• CANopen
• RS-232
Feedback
• Digital Quad A/B encoder
I/O - Digital
• 12 inputs, 4 outputs
Dimensions: mm [in]
• 102 x 69 x 25 [4.0 x 2.7 x 1.0]
|
Model |
VDC |
IC |
IP |
|
STM-075-07 |
20-75 |
5 |
7 |
DESCRIPTION
Stepnet is a stepper motor drive that combines CANopen networking
with 100% digital control of stepper motors. When used with
Copley’s Accelnet™ and Xenus™ digital servo drives it enables
brushless, brush, and now stepper motors to be controlled over
the same distributed network.
In addition to CANopen motion commands, Stepnet can operate as
a stand-alone drive. Inputs can be incremental position commands
from controllers in Step/Direction or CU/CD format, as well as
A/B quadrature commands from a master-encoder. Step to motor
position ratio is programmable for electronic gearing.
The RoHS version has a ±10V analog input for position/velocity/
torque control. This enhances the ability of the driver to work
with external motion controllers which can control steppers using
Stepnet in servo-mode.
Set up is fast and simple using CME 2™ software operating under
Windows® and communicating with Stepnet via an RS-232 link.
CAN address selection is by digital inputs.
Stepnet operates as a Motion Control Device under the DSP-402
protocol of the CANopen DS-301 V4.01 (EN 50325-4) application
layer. DSP-402 modes supported include: Profile Position Mode,
Interpolated Position Mode (PVT), and Homing Mode.
Profile Position Mode does a complete motion index on command
with S-curve acceleration & deceleration, top speed, and distance
programmable. In PVT mode, the controller sends out a sequence
of points each of which is an increment of a larger, more complex
move than that of a single index or profile. The drive then uses cubic
polynomial interpolation to “connect the dots” such that the motor
reaches each point (Position) at the specified velocity (Velocity) at
the prescribed time (Time). Homing mode is configurable to work
with a combination of limit and home switches such that the drive
moves the motor into a position that has an absolute reference to
some part of the machine.
There are twelve logic inputs. Eleven are programmable as limit &
home switches, stepper pulse inputs, A/B encoder, reset, or motortemperature.
Another dedicated input is for drive Enable. There
are four programmable logic outputs for reporting a drive fault, or
other status indications.
An Aux HV input is provided for “keep alive” power that preserves
the drive data (e.g. current position) and CANopen operation if +HV
has been removed as in an emergency-stop situation. This enables
the control system to monitor drive status and to enable an orderly
recovery without a full system reset, and “homing” of all axes.
Operation from transformer-isolated DC power supplies saves cost
in multi-axis systems.

STL Micro Module

Control Modes
• Indexer, Point-to-Point, PVT
• Camming, Gearing
• Position, Velocity, Torque [Servo Mode]
• Position (Microstepping)
Command Interface
• CANopen
• ASCII and discrete I/O
• Stepper commands
• PWM velocity/torque command
• Master encoder [Gearing/Camming]
Communications
• CANopen
• RS-232
Feedback
• Digital Quad A/B encoder
I/O - Digital
• 12 inputs, 4 outputs
Dimensions: mm [in]
• 64 x 41 x16 [2.5 x 1.6 x 0.6]
|
Model |
VDC |
IC |
IP |
|
STL-055-04 |
55 |
3 |
4.5 |
|
STL-075-03 |
75 |
2 |
3 |
DESCRIPTION
Stepnet Micro Module is a stepper motor driver in a 4
in2 pc-board mounting package that combines CANopen
networking with 100% digital control of stepper motors.
Power output is compatible with most NEMA 17 and 23 size
stepper motors. The small footprint is well-suited for desktop
instrumentation and enables motor drive, interface, power
supply, and control circuits to be combined on a single PC
board.
Stepnet Micro Module can also operate as a stand-alone
driver taking incremental position commands from stepmotor
controllers in Step/Direction or CU/CD format, as well
as A/B quadrature commands from a master-encoder. Step
to motor position ratio is programmable for electronic
gearing.
When fitted with an incremental encoder a stepper motor
can be operated as a brushless servo motor using Stepnet
Micro Module’s Servo Mode feature, or as a conventional
stepper with stall detection.
Set up is fast and simple using CME 2™ software operating
under Windows® and communicating with Stepnet Micro
Module via an RS-232 link. CAN address selection is by
digital inputs or can be programmed into driver flash
memory.
As a CANopen node Stepnet Micro Module operates as a
Motion Control Device under the DSP-402 protocol of the
CANopen DS-301 V4.01 (EN 50325-4) application layer.
DSP-402 modes supported include: Profile Position, Profile
Velocity, Interpolated Position (PVT), and Homing. When in
Servo Mode, operating the stepper as a servo motor with
encoder feedback, Profile Torque mode is available.
Profile Position Mode does a complete motion index on
command with S-curve acceleration & deceleration, top
speed, and distance programmable. In PVT mode, the
controller sends out a sequence of points each of which
is an increment of a larger, more complex move than
that of a single index or profile. Profile Velocity mode has
acceleration, deceleration, and velocity control without a
position setpoint. Homing mode is configurable to work
with a combination of limit and home switches such that the
driver moves the motor into a position that has an absolute
reference to some part of the machine.
One logic input [IN1] is dedicated for the driver Enable
function. The other eleven are programmable as CAN
address, limit & home switches, stepper pulse inputs, A/B
master encoder, motor feedback encoder, reset, motion
abort, or motor-temperature. There are four programmable
logic outputs for reporting a driver fault, or other status
indications. When operating as a CAN node, inputs and
outputs can be used as general-purpose I/O with no link to
amplifier functions.
An Aux HV input is provided for “keep alive” power that
preserves the driver data (e.g. current position) and
CANopen operation if +HV has been removed as in an
emergency-stop situation. This enables the control system
to monitor drive status and to enable an orderly recovery
without a full system reset, and “homing” of all axes.
Operation from transformer-isolated DC power supplies
saves cost in multi-axis systems.
StepnetPLUS Module

SPM

Control Modes
• Position (Microstepping)
• Position/Velocity/Torque (Servo Mode)
• Indexer, Point-to-Point, PVT
• Camming, Gearing
Command Interface
• CANopen
• ASCII and discrete I/O
• Stepper commands
• ±10V or PWM velocity/torque (servo mode)
• Master encoder (Gearing/Camming)
Communications
• CANopen
• RS-232
Feedback
Incremental
• Digital quad A/B encoder
I/O
• Digital: 14 inputs, 6 outputs
• Analog: 1 input
Dimensions: mm [in]
• 76.3 x 58.2 x 20.5 [3.01 x 2.29 x 0.81]
|
Model |
VDC |
IC |
IP |
|
SPM-090-07 |
14-90 |
5 |
7 |
|
SPM-090-10 |
14-90 |
10 |
10 |

DESCRIPTION
Stepnet SPM is a high-performance, DC powered servo drive for
control of stepper motors via CANopen. The SPM operates as an
CANopen node using DSP-402 for motion control devices. Supported
modes include: Profile Position, Profile Velocity, Interpolated Position
Mode (PVT), and Homing.
With encoder feedback a stepper can be operated as a brushless
servo motor enabling ±10V analog or digital PWM velocity or torque
control in addition to CANopen. Direct position control from pulses
in CW/CCW, Pulse/Dir, or Quad A/B encoder format works in either
microstepping or servo modes.
Twelve high-speed digital inputs with programmable functions are
provided, and a lower-speed input for a motor temperature switch.
An SLI (Serial Peripheral Interface) function is supported by another
high-speed input and four high-speed digital outputs. If not used for
SLI, the input and outputs are programmable for other functions.
Two open-drain MOSFET can drive loads powered up to 24 Vdc.
An RS-232 serial port provides a connection to Copley’s CME2
software for commissioning, firmware upgrading, and saving
configurations to flash memory.
Drive power is transformer-isolated DC from regulated or
unregulated power supplies. An AuxHV input is provided for
“keep-alive” operation permitting the drive power stage to be
completely powered down without losing position information, or
communications with the control system.

SEM

Control Modes
• Indexer, Point-to-Point, PVT
• Camming, Gearing
• Position, Velocity, Torque (Servo Mode)
• Position (Microstepping)
Command Interface
• CAN application layer over EtherCAT (CoE)
• ASCII and discrete I/O
• Stepper commands
• ±10V Velocity/torque command (servo mode)
• PWM Velocity/torque command (servo mode)
• Master encoder (Gearing/Camming)
Communications
• EtherCAT
• RS-232
Feedback
Incremental
• Digital quad A/B encoder
I/O
• Digital: 14 inputs, 6 outputs
• Analog: 1 input
Dimensions: mm [in]
• 76.3 x 58.2 x 20.5 [3.01 x 2.29 x 0.81]
|
Model |
VDC |
IC |
IP |
|
SEM-090-07 |
14-90 |
5 |
7 |
|
SEM-090-10 |
14-90 |
10 |
10 |

DESCRIPTION
Stepnet SEM is a high-performance, DC powered drive for control of
stepper motors via EtherCAT, an Ethernet-based fieldbus. The SEM
operates as an EtherCAT slave using the CAN application layer over
EtherCAT (CoE). Supported modes include: Profile Position-Velocity,
Cyclic Synchronous Position-Velocity (CSP, CSV), Interpolated
Position Mode (PVT), and Homing.
With encoder feedback a stepper can be operated as a brushless
servo motor enabling ±10V analog or digital PWM velocity or torque
control in addition to EtherCAT. Direct position control from pulses
in CW/CCW, Pulse/Dir, or Quad A/B encoder format works in either
microstepping or servo modes.
Twelve high-speed digital inputs with programmable functions are
provided, and a lower-speed input for a motor temperature switch.
An SLI (Switch & LED Interface) function is supported by another
high-speed input and four high-speed digital outputs. If not used for
SLI, the input and outputs are programmable for other functions.
Two open-drain MOSFET outputs can drive loads powered up to
24 Vdc.
An RS-232 serial port provides a connection to Copley’s CME2
software for commissioning, firmware upgrading, and saving
configurations to flash memory.
Drive power is transformer-isolated DC from regulated or
unregulated power supplies. An AuxHV input is provided for
“keep-alive” operation permitting the drive power stage to be
completely powered down without losing position information, or
communications with the control system.

SP2

Control Modes
• Position (Microstepping)
• Position/Velocity/Torque (Servo Mode)
• Indexer, Point-to-Point, PVT
• Camming, Gearing
Command Interface
• CANopen
• ASCII and discrete I/O
• Stepper commands
• ±10V or PWM velocity/torque (servo mode)
• Master encoder (Gearing/Camming)
Communications
• CANopen
• RS-232
Feedback
• Digital quad A/B encoder
I/O
• Digital: 26 inputs, 7 outputs
• Analog: 2 inputs
Dimensions: mm [in]
• 114 x 73 x 21 [4.5 x 2.9 x 0.83]
|
Model |
VDC |
IC |
IP |
|
SP2-090-07 |
14-90 |
5 |
7 |
|
SP2-090-10 |
14-90 |
10 |
10 |

DESCRIPTION
Stepnet SP2 is a dual-axis, high-performance, DC powered drive
for position, and velocity control of stepper motors via CANopen.
Using advanced FPGA technology, the SP2 provides a significant
reduction in the cost per node in multi-axis CANopen systems.
Each of the two drives in the SP2 operate as CANopen nodes under
DSP-402 for motion control devices. Supported modes include:
Profile Position-Velocity, Interpolated Position Mode (PVT), and
Homing.
Servo mode allows ±10V analog position/velocity/torque, and
PWM velocity/torque control. Servo mode allows ±10V analog or
digital PWM control of position/velocity/torque. In microstepping
mode stepper command pulses and master encoder for camming
or gearing is supported.
Twenty-three high-speed digital inputs with programmable functions
are provided, and two low-speed inputs for motor temperature
switches.
An SLI (Switch & LED Interface) function is supported by another
high-speed input and four high-speed digital outputs. If not used for
SLI, the input and outputs are programmable for other functions.
Three open-drain MOSFET can drive loads powered up to 24 Vdc.
An RS-232 serial port provides a connection to Copley’s CME2
software for commissioning, firmware upgrading, and saving
configurations to flash memory.
Drive power is transformer-isolated DC from regulated or
unregulated power supplies. An AuxHV input is provided for
“keep-alive” operation permitting the drive power stage to be
completely powered down without losing position information, or
communications with the control system.

SE2

Control Modes
• Position (Microstepping)
• Position/Velocity/Torque (Servo Mode)
• Indexer, Point-to-Point, PVT
• Camming, Gearing
Command Interface
• CAN application layer over EtherCAT (CoE)
• ASCII and discrete I/O
• Stepper commands
• ±10V or PWM velocity/torque (servo mode)
• Master encoder (Gearing/Camming)
Communications
• EtherCAT
• RS-232
Feedback
• Digital quad A/B encoder
I/O
• Digital: 26 inputs, 7 outputs
• Analog: 2 inputs
Dimensions: mm [in]
• 114 x 73 x 21 [4.5 x 2.9 x 0.83]
|
Model |
VDC |
IC |
IP |
|
SE2-090-07 |
14-90 |
5 |
7 |
|
SE2-090-10 |
14-90 |
10 |
10 |

DESCRIPTION
Stepnet SE2 is a dual-axis, high-performance, DC powered drive for
position, velocity, and torque control of stepper motors via EtherCAT,
an Ethernet-based fieldbus. Using advanced FPGA technology, the
SE2 provides a significant reduction in the cost per node in multiaxis
EtherCAT systems.
Each of the two drives in the SE2 operate as an EtherCAT slave using
the CAN application layer over EtherCAT (CoE) protocol of DSP-
402 for motion control devices. Supported modes include: Profile
Position-Velocity, Cyclic Synchronous Position-Velocity, Interpolated
Position Mode (PVT), and Homing. Servo mode allows ±10V analog
or digital PWM control of position/velocity/torque. In microstepping
mode stepper command pulses and master encoder for camming
or gearing is supported.
Twenty-three high-speed digital inputs with programmable functions
are provided, and two low-speed inputs for motor temperature
switches.
An SLI (Switch & LED Interface) function is supported by another
high-speed input and four high-speed digital outputs. If not used for
SLI, the input and outputs are programmable for other functions.
Three open-drain MOSFET can drive loads powered up to 24 Vdc.
An RS-232 serial port provides a connection to Copley’s CME2
software for commissioning, firmware upgrading, and saving
configurations to flash memory.
Drive power is transformer-isolated DC from regulated or
unregulated power supplies. An AuxHV input is provided for
“keep-alive” operation permitting the drive power stage to be
completely powered down without losing position information, or
communications with the control system.

Control Modes
• Profile Position-Velocity-Torque, Interpolated Position, Homing
• Camming, Gearing
• Indexer
Command Interface
• CANopen
• ASCII and discrete I/O
• Master encoder (Gearing/Camming)
• Stepper mode position commands:
Digital: Pulse/Dir, CW/CCW, Quad A/B
Analog: ±10V position
• Servo mode commands:
Digital: Pulse/Dir, CW/CCW, Quad A/B
PWM velocity/torque command
Analog: ±10V position/velocity/torque
Communications
• CANopen
• RS-232
Feedback
Incremental Encoders
• Digital quad A/B
• Panasonic Incremental A Format
• Aux. quad A/B encoder / encoder
out Absolute Encoders
• EnDat, Absolute A
I/O Digital
• non-isolated, 8 isolated inputs,
• 5 isolated outputs, 2 non-isolated outputs
Analog
• 2 Reference Inputs, 12-bit
Safe Torque Off (STO)
• SIL 3, Category 3, PL d
Dimensions: IN [mm]
• 6.78 x 4.70 x 1.99 [172.1 x 119.3 x 50.4] no heatsink
• 6.78 x 4.70 x 3.14 [172.1 x 119.3 x 79.9] with heatsink
|
Model |
VDC |
IC |
IP |
|
TP2-090-07 |
90 |
5 |
7 |
|
TP2-090-10 |
90 |
10 |
10 |
Current ratings are for each axis
DESCRIPTION
Stepnet TP2 is a dual-axis, high-performance, DC powered drive for position
and velocity control of stepper motors via CANopen.
Using advanced FPGA technology, the TP2 provides a significant reduction in
the cost per node in multi-axis CANopen systems. Each of the two axes in the
TP2 operate as CANopen nodes under DSP-402 for motion control devices.
Supported modes include: Profile Position-Velocity, Interpolated Position Mode (PVT),
and Homing. In microstepping mode stepper command pulses and master encoder
for camming or gearing are supported.
Servo mode allows ±10V analog position/velocity/torque, and PWM velocity/torque control.
There are sixteen high-speed digital inputs, two low-speed inputs for motor temperature
switches, and eight optically isolated inputs. Outputs include five opto-isolated SSR and two
isolated brake outputs. All inputs and outputs have programmable functions.
An RS-232 serial port provides a connection to Copley’s CME2 software for commissioning,
firmware upgrading, and saving configurations to flash memory.
Drive power is transformer-isolated DC from regulated or unregulated power supplies.
An AuxHV input is provided for “keep-alive” operation enabling the drive PWM outputs
to be completely powered down without losing position information, or communications
with the control system.


Control Modes
• Microstepping Mode: Profile Position/Velocity, Interpolated Position, Homing
• Servo Mode: Cyclic Synchronous Position/Velocity/Torque
(CSP/CSV/CST)
• Camming, Gearing
• Indexer
Command Interface
• CANopen application protocol over EtherCAT (CoE)
• ASCII and discrete I/O
• Stepper commands
• ±10V position/velocity/torque
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
Communications
• EtherCAT
• RS-232
Feedback
Incremental Encoders
• Digital quad A/B/X
• Aux. quad A/B/X encoder Absolute Encoders
• EnDat, Sanyo Denki Absolute A
I/O Digital
• 6 High-speed inputs
• 1 Motor over-temp input
• 4 Opto-Isolated inputs
• 3 Opto-Isolated outputs
• 1 Opto-Isolated brake output
I/O Analog
• 1 Reference Input, 12-bit
Safe Torque Off (STO)
• SIL 3, Category 3, PL d
Dimensions: IN [mm]
• 5.08 x 3.41 x 1.99 [129 x 86.6 x 50.4]
• 5.08 x 3.41 x 3.39 [129 x 86.6 x 86.1] with heatsink
|
Model |
VDC |
IC |
IP |
|
TEL-090-07 |
90 |
5 |
7 |
|
TEL-090-10 |
90 |
10 |
10 |
DESCRIPTION
Stepnet Plus TEL is a high-performance DC powered microstepping drive for
control of hybrid stepping motors via EtherCAT using the CAN Application
protocol for EtherCAT (CoE). Microstepping modes are Profile Position,
Interpolated Position Mode (PVT), and Homing. With encoder feedback,
the TEL can operate a stepper as a brushless servo motor,
enabling Cyclic Sync Position/Velocity/ Torque operation.
As well as operating on EtherCAT networks, the TEL also supports the following
traditional control modes: step/direction, RS-232 ASCII, master encoder for
gearing and camming, digital input commands to initiate predetermined motion
sequences. Drive commissioning is fast and simple using CME 2™ software
operating under Windows® and communicating with the TEL via RS-232 or an
EtherCAT network. Feedback from incremental and absolute encoders is supported.
A multi-mode encoder port functions as an input or output depending on the drive’s
basic setup. As an input it takes feedback from a secondary encoder to create a
dual-loop position control system or as a master encoder for driving a cam table.
As an output, it buffers the digital encoder signals from the motor’s digital encoder
and eliminates split cables that would be needed to send the signals to both drive
and control system. There are seven non-isolated inputs and four opto-isolated
digital inputs that are bipolar types, sourcing or sinking current into a common
connection that can be tied to ground or +24V. [IN1] defaults to the drive Enable
function and is programmable to other functions. The other inputs are programmable.
All inputs have programmable active levels. Three opto-isolated outputs [OUT1~3]
have individual collector/emitter connections. An isolated MOSFET output [OUT4] is
programmable to drive a motor brake or other functions and has an internal flyback
diode for driving inductive loads. Drive power is transformer-isolated DC from regulated
or unregulated power supplies. An AuxHV input is provided for “keep-alive” operation
permitting the drive power stage to be completely powered down without losing position
information, or communications with the control system.


Control Modes
• Stepper mode: Cyclic Synchronous Position (CSP)
• Servo mode: Cyclic Synchronous Position/Velocity/Torque
(CSP, CSV, CST)
• Profile Position-Velocity-Torque, Interpolated Position, Homing
• Camming, Gearing
• Indexer
Command Interface
• CANopen application protocol over EtherCAT (CoE)
• ASCII and discrete I/O
• Master encoder (Gearing/Camming)
• Stepper mode position commands:
Digital: Pulse/Dir, CW/CCW, Quad A/B
Analog: ±10V position
• Servo mode commands:
Digital: Pulse/Dir, CW/CCW, Quad A/B
PWM velocity/torque command
Analog: ±10V position/velocity/torque
Communications
• EtherCAT
• RS-232
Feedback
Incremental Encoders
• Digital quad A/B
• Panasonic Incremental A Format
• Aux. quad A/B encoder / encoder out
Absolute Encoders
• EnDat, Absolute A
I/O Digital
• 24 non-isolated, 8 isolated inputs,
• 5 isolated outputs, 2 non-isolated outputs
Analog
• 2 Reference Inputs, 12-bit
Safe Torque Off (STO)
• SIL 3, Category 3, PL d
Dimensions: IN [mm]
• 6.78 x 4.70 x 1.99 [172.1 x 119.3 x 50.4] no heatsink
• 6.78 x 4.70 x 3.14 [172.1 x 119.3 x 79.9] with heatsink
|
Model |
VDC |
IC |
IP |
|
TE2-090-07 |
90 |
5 |
7 |
|
TE2-090-10 |
90 |
10 |
10 |
Current ratings are for each axis
DESCRIPTION
Stepnet Plus TE2 is a 2-axis, high-performance DC powered microstepping
drive for control of hybrid stepping motors via EtherCAT using the
CAN Application Layer for EtherCAT (CoE).
Microstepping modes are Profile Position, Interpolated Position Mode (PVT),
and Homing.
With encoder feedback, the TE2 can operate a stepper as a brushless servo motor,
enabling Cyclic Sync Position/ Velocity/Torque operation, too.
As well as operating on EtherCAT networks, the TE2 also operates in the following
traditional control modes: step/direction, RS-232 ASCII, master encoder for gearing
and camming, digital input commands to initiate predetermined motion sequences.
There are sixteen non-isolated inputs and eight opto-isolated digital inputs that are
bipolar types, sourcing or sinking current into a common connection that can be tied
to ground or +24V. [IN1&10] default to the drive Enable function for axes A & B,
and are programmable to other functions. The other inputs are programmable.
All inputs have programmable active levels.
Five opto-isolated outputs [OUT1~5] have individual collector/emitter connections.
Two MOSFET outputs [OUT6~7] are programmable to drive motor brakes or other
functions and have internal flyback diodes for driving inductive loads. Drive power is
transformer-isolated DC from regulated or unregulated power supplies.
An AuxHV input is provided for “keep-alive” operation permitting the drive power
stage to be completely powered down without losing position information,
or communications with the control system.


Control Modes
• Position (Microstepping)
• Position/Velocity/Torque (Servo Mode)
• Indexer, Point-to-Point, PVT
• Camming, Gearing
Command Interface
• CANopen
• ASCII and discrete I/O
• Stepper commands
• Master encoder (Gearing/Camming)
Communications
• CANopen
• RS-232
Feedback
• Digital quad A/B/X encoder
I/O Digital
• 24 HS inputs
• 8 MOSFET outputs
I/O SPI
• 1 HS input
• 4 HS outputs
Dimensions: mm [in]
• 101.6 x 76.2 x 20.83 [4.00 x 3.00 x 0.83]
|
Model |
VDC |
IC |
IP |
|
SP4-055-03 |
14-55 |
3 |
3 |
DESCRIPTION
Stepnet SP4 is a four-axis, high-performance, DC powered drive for position,
and velocity control of stepper motors via CANopen.
Using advanced FPGA technology, the SP4 provides a significant reduction in
the cost per node in multi-axis CANopen systems. Each of the four axes in the
SP4 operate as CANopen nodes under DSP-402 for motion control devices.
Supported modes include: Profile Position-Velocity, Interpolated Position Mode (PVT),
and Homing. Servo mode allows position/velocity/torque control.
Servo mode allows CANopen or digital PWM control of position/velocity/torque.
In microstepping mode stepper command pulses and master encoder for camming or
gearing is supported.
Twenty-four high-speed digital inputs with programmable functions are provided.
There are eight mosfet outputs that are 24V compatible.
An SPI port is provided with one high-speed input and four high-speed digital outputs.
If not used for SPI, the input and outputs are programmable for other functions.
An RS-232 serial port provides a connection to Copley’s CME2 software for commissioning,
firmware upgrading, and saving configurations to flash memory.
The CANopen port is optically isolated.
Drive power is transformer-isolated DC from regulated or unregulated power supplies.
An AuxHV input is provided for “keep-alive” operation permitting the drive power stage to
be completely powered down without losing position information, or communications with
the control system.


Control Modes
• Cyclic Synchronous Position/Velocity (CSP, CSV in servo mode)
• Profile Position/Velocity, Interpolated Position, Homing
• Position: Digital Inputs
• Indexer, Point-to-Point, PVT
• Camming, Gearing
Command Interface
• CANopen application protocol over EtherCAT (CoE)
• ASCII and discrete I/O
• Stepper commands
• PWM velocity command
• Master encoder (Gearing/Camming)
Communications
• EtherCAT
• RS-232
Feedback
• Digital quad A/B/X encoder
I/O Digital
• 24 HS inputs
• 8 MOSFET outputs
I/O SPI
• 1 HS input
• 4 HS outputs
Dimensions: mm [in]
• 101.6 x 76.2 x 20.83 [4.00 x 3.00 x 0.83]
|
Model |
VDC |
IC |
IP |
|
SE4-055-03 |
14-55 |
3 |
3 |
DESCRIPTION
Stepnet SE4 is a four-axis, high-performance, DC powered drive for position,
velocity, and torque control of stepper motors via EtherCAT, an EtherNET-based fieldbus.
Using advanced FPGA technology, the SE4 provides a significant reduction in the cost per
node in multiaxis EtherCAT systems. Each of the four drives in the SE4 operates as an
EtherCAT slave using the CAN Application protocol over EtherCAT (CoE) of CiA402 for motion
control devices. Supported modes include: Cyclic Synchronous Position-Velocity,
Profile Position-Velocity, Interpolated Position Mode (PVT), and Homing.
Servo mode provides digital PWM control of position/velocity/torque.
In microstepping mode stepper command pulses and master encoder for camming
or gearing is supported. Twenty-four high-speed digital inputs with programmable
functions are provided. There are eight mosfet outputs that are 24V compatible.
An SLI (Switch & LED Interface) function is supported by another high-speed input and
four high-speed digital outputs. If not used for SLI, the input and outputs are programmable
for other functions. Eight open-drain MOSFET can drive loads powered up to 24 Vdc.
An RS-232 serial port provides a connection to Copley’s CME2 software for commissioning,
firmware upgrading, and saving configurations to flash memory.
The EtherCAT port is magnetically isolated. Drive power is transformer-isolated DC from
regulated or unregulated power supplies. An AuxHV input is provided for “keep-alive”
operation permitting the drive power stage to be completely powered down without
losing position information, or communications with the control system.


Control Modes
• Position (Microstepping)
• Position/Velocity/Torque (Servo Mode)
• Indexer, Point-to-Point, PVT
• Camming, Gearing
Command Interface
• CANopen
• ASCII and discrete I/O
• Stepper commands
• ±10V or PWM velocity/torque (servo mode)
• Master encoder (Gearing/Camming)
Communications
• CANopen
• RS-232
Feedback
Incremental
• Digital quad A/B encoder
I/O
• Digital: 14 inputs, 6 outputs
• Analog: 1 input
Dimensions: mm [in]
• 76.3 x 58.2 x 20.5
[3.01 x 2.29 x 0.81]
|
Model |
VDC |
IC |
IP |
|
R52-090-07 |
14-90 |
5 |
7 |
|
R52-090-10 |
14-90 |
10 |
10 |
DESCRIPTION
Stepnet R52 is a high-performance, DC powered driver for control of stepper
motors via CANopen. The R52 operates as an CANopen node using DSP-402
for motion control devices. Supported modes include: Profile Position,
Profile Velocity, Interpolated Position Mode (PVT), and Homing.
With encoder feedback a stepper can be operated as a brushless servo motor
enabling ±10V analog or digital PWM velocity or torque control in addition to CANopen.
Direct position control from pulses in CW/CCW, Pulse/Dir, or Quad A/B encoder
format works in either microstepping or servo modes. Twelve high-speed digital
inputs with programmable functions are provided, and a lowerspeed input for a
motor temperature switch. An SLI (Serial Peripheral Interface) function is supported
by another high-speed input and four high-speed digital outputs. If not used for SLI,
the input and outputs are programmable for other functions. Two open-drain MOSFET
can drive loads powered up to 24 Vdc. An RS-232 serial port provides a connection to
Copley’s CME2 software for commissioning, firmware upgrading, and saving configurations
to flash memory.
Drive power is transformer-isolated DC from regulated or unregulated power supplies.
An AuxHV input is provided for “keep-alive” operation permitting the drive power stage
to be completely powered down without losing position information, or communications
with the control system.
資料來源: https://www.copleycontrols.com/wp-content/uploads/2018/02/R52_DS.pdf