
提供最適合您的方案
WE PROVIDE YOU THE BEST SOLUTION
運動控制系統及元件
-
 運動控制器+軸卡
運動控制器+軸卡
-
 步進/伺服驅動器
步進/伺服驅動器
-
 伺服馬達
伺服馬達
步進馬達
音圈馬達
線性馬達
直驅馬達 -
 回授元件
回授元件
光學尺
磁性尺
Linear Encoder
編碼器
顯示器 -
 空氣軸承
空氣軸承
Air Bearing
Air conveyor -
 多孔性陶瓷真空吸盤
多孔性陶瓷真空吸盤
Porous Ceramic Chuck Table -
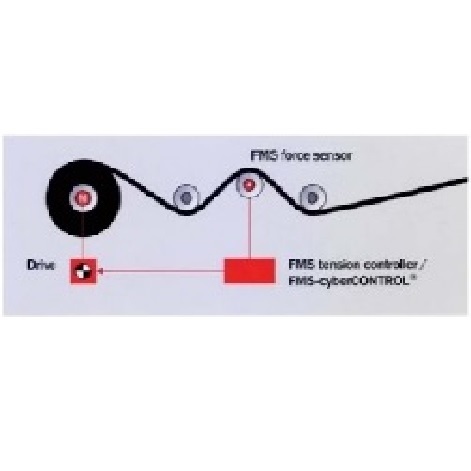 FMS 張力控制器
FMS 張力控制器
張力放大器
張力 sensor -
 HarmonicDrive® 諧波減速機
HarmonicDrive® 諧波減速機
DirectDrive Motor 直驅電動機
Rotary Actuator 旋轉執行元件 -
 減速機 / 齒輪齒排
減速機 / 齒輪齒排
-
 聯軸器 / 免鍵式軸襯
聯軸器 / 免鍵式軸襯
-
 定位平台 (滑台) /
定位平台 (滑台) /
Stage / X-Y-Z Table
Theta Hybrid Hexapod
史都華平台 -
 ALIO Hybrid Hexapod
ALIO Hybrid Hexapod
史都華平台 -
 次系統設備(客製)
次系統設備(客製)
-
 電動缸 / 千斤頂 /
電動缸 / 千斤頂 /
升降器 / 線性致動器 -
 軸承 / 線性軸承 /
軸承 / 線性軸承 /
線性滑台 -
 線性滑軌
線性滑軌
-
 固態繼電器SSR
固態繼電器SSR
-
 Karl Klein 鼓風機
Karl Klein 鼓風機
-
 特殊環境用--
特殊環境用--
防爆、防水、
真空、低溫、重載 -
 應用案例影片
應用案例影片
-
 庫存出清
庫存出清
Xenus 線性伺服驅動器 AC 電源入力 (XTL、XSJ、XPL、XEL、XPC、XP2、XE2、XEC、XML、XM2、R10、R11)
|
PDF下載 |
|||||||||||
Xenus


Control Modes
• Indexer, Point-to-Point, PVT
• Camming, Gearing, Position, Velocity, Torque
Command Interface
• Stepper commands
Single-ended or Differential selectable
• CANopen
• ASCII and discrete I/O
• ±10V position/velocity/torque command
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
Communications
• CANopen
• RS232
Feedback
• Digital quad A/B encoder
• Analog sin/cos encoder (-S versions)
• Resolver (-R versions)
• Secondary encoder / emulated encoder out
• Digital Halls
I/O - Digital
• 12 inputs, 4 outputs
Accessories
• External regen resistors
• External edge filter
Dimensions: mm [in]
• 7.5 x 5.5 x 2.5 [191 x 140 x 64]
|
Model |
VAC |
IC |
IP |
|
XTL-230-18 |
100-240 |
6 |
18 |
|
XTL-230-36 |
100-240 |
12 |
36 |
|
XTL-230-40 |
100-240 |
20 |
40 |
Add -S to part numbers above for sin/cos feedback,
or add -R for resolver feedback models.
DESCRIPTION
Xenus combines CANopen networking with 100% digital control of
brushless or brush motors in an off-line powered package that can
operate from single or three-phase mains with continuous power
output to 4 kW.
Standard models use quad A/B digital encoders for feedback. Two
other versions are available for use with resolvers or sin/cos analog
encoders.
Xenus operates as a Motion Control Device under the DSP-402
protocol of the CANopen DS-301 V4.01 (EN 50325-4) application
layer. DSP-402 modes supported include: Profile Position, Profile
Velocity, Profile Torque, Interpolated Position (PVT), and Homing.
Drive commissioning is fast and simple using CME 2 software
operating under Windows® communicating with Xenus via CAN or an
RS-232 link. CAN address selection is by a 16-position rotary switch
on the front panel. If there are more than fifteen devices on a CAN
bus, the additional address bits needed can come from programmable
inputs, or can be set in flash memory. Profile Position Mode does
a complete motion index on command with S-curve acceleration &
deceleration, top speed, and distance programmable. In PVT mode,
the controller sends out a sequence of points each of which is an
increment of a larger, more complex move than a single index or
profile. The drive then uses cubic polynomial interpolation to “connect
the dots” such that the motor reaches each point (Position) at the
specified velocity (Velocity) at the prescribed time (Time).
Homing mode is configurable to work with a variety of limit,
index, and home switches such that the drive moves the motor
into a position that has an absolute reference to some part of the
machine. Eleven logic inputs are programmable as limit or home
switches, stepper/encoder pulse inputs, reset, digital torque or
velocity reference, or motor over-temperature. A twelfth input is
dedicated to the drive Enable function. Three programmable logic
outputs are for reporting a drive fault or other status indications.
A fourth optically-isolated output can drive a motor brake from
the external +24 Vdc power supply or can be programmed as a
logic output.
In addition to CANopen motion commands, Xenus can operate as
a stand-alone drive. Current and velocity modes accept ±10 Vdc
analog, digital 50% PWM or PWM/polarity inputs. In position mode
inputs can be incremental position commands from step-motor
controllers in Pulse/Direction or CW/CCW format, ±10 Vdc analog,
or A/B quadrature commands from a master-encoder. Pulse to
position ratio is programmable for electronic gearing.
Power output of the drive varies with the input power which can
range from 100 to 240 Vac, and from 47 to 63 Hz. Either single
or three phase mains can be used giving Xenus the ability to work
in the widest possible range of industrial settings. Signal and
control circuits are isolated from the high-voltage power supply
and inverter stage that connect to the mains. A +24 Vdc input
powers control circuits for keep-alive operation permitting the drive
power stage to be completely powered down without losing position
information or communications with the control system.
資料來源: https://www.copleycontrols.com/wp-content/uploads/2018/02/Xenus_CANopen-XTL-Datasheet-Datasheet.pdf

XSJ Micro Panel

Feedback VERSIONS
• Analog Sin/Cos
• Quad A/B digital
• Resolver
CONTROL MODES
• Indexer, Point-to-Point, PVT
• Camming, Gearing, Position, Velocity, Torque
COMMAND INTERFACE
• CANopen
• ASCII and discrete I/O
• Stepper commands
• ±10 Vdc position/velocity/torque command
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
• Digital inputs for indexer control
COMMUNICATIONS
• CANopen
• RS232
FEEDBACK
• Digital Quad A/B encoder
• Analog sin/cos encoder (-S versions)
• Resolver (-R versions)
• Secondary encoder / emulated encoder out
• Digital Halls
I/O - DIGITAL
• 14 inputs, 4 outputs
REGEN
• Internal
DIMENSIONS: MM [IN]
• 126 x 89 x 53 [5.0 x 3.5 x 2.1]
|
Model |
VAC |
IC |
IP |
|
XSJ-230-02 |
100-240 |
1 |
2 |
|
XSJ-230-06 |
100-240 |
3 |
6 |
|
XSJ-230-10 |
100-240 |
5 |
10 |
Add “-R” to part number for Resolver version
DESCRIPTION
Xenus Micro is a compact, AC powered servo drive for position,
velocity, and torque control of AC brushless and DC brush motors.
It operates on a distributed control network, as a stand-alone
indexing drive, or with external motion controllers.
Feedback options now include brushless resolvers in addition to
digital quad A/B and analog sin/cos incremental encoders. The
multi-mode encoder port operates as an input or output for the
feedback signals. As an input, a secondary digital quad A/B encoder
is used for dual-loop position control. Resolver and sin/cos signals
are interpolated internally with programmable resolution and appear
as digital quad A/B signals when the port functions as an output. Or,
the digital quad A/B signals are simply buffered and made available
to the system controller, eliminating cumbersome Y-cabling to share
a single encoder with drive and control system.
Indexing mode simplifies operation with PLC’s that use outputs to
select and launch indexes and inputs to read back drive status. A
single serial port on the PLC can send ASCII data to multiple drives
to change motion profiles as machine requirements change.
CAN bus operation supports Profile Position, Profile Velocity, Profile
Torque, Interpolated Position, and Homing. Up to 127 Xenus Micro
drives can operate on a single CAN bus and groups of drives can be
linked via the CAN so that they execute motion profiles together.
Operation in torque (current), velocity, and position modes with
external motion controllers is supported. Input command signals
are ±10 Vdc (torque, velocity, position), PWM/Polarity (torque,
velocity), or Step/Direction (position).
XenusPLUS

XPL
Control Modes
• Profile Position-Velocity-Torque, Interpolated Position, Homing
• Camming, Gearing
• Indexer
Command Interface
• CANopen
• ASCII and discrete I/O
• Stepper commands
• ±10V position/velocity/torque (2 inputs)
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
Communications
• CANopen DS-402
• RS-232
Feedback
Incremental
Incremental Encoders
• Digital quad A/B
Analog Sin/Cos
Panasonic Incremental A Format
• Aux. quad A/B encoder / encoder out
Absolute Encoders
• SSI, EnDat, Absolute A,
Tamagawa & Panasonic Absolute A
Sanyo Denki Absolute A, BiSS (B & C)
Resolver (-R option)
• Brushless Resolver
Other
• Digital Halls
Accessories
• External regen resistors
• External edge filter
Safe Torque Off (STO)
• Two active inputs enable power stage
• One output confirms power stage status
I/O Digital
• 15 inputs, 6 outputs
I/O Analog
• 2, 16-bit inputs
• 1, 12-bit input
• 1, 12-bit output
Dimensions: in [mm]
• 7.9 x 5.5 x 2.3 [202 x 139 x 52]
|
Model |
VAC |
IC |
IP |
|
XPL-230-18 |
100-240 |
6 |
18 |
|
XPL-230-36 |
100-240 |
12 |
36 |
|
XPL-230-40 |
100-240 |
20 |
40 |
Add -R for resolver feedback option
DESCRIPTION
Xenus Plus set new levels of performance, connectivity, and flexibility. CANopen communication
provides a widely used cost-effective industrial bus. A wide range of absolute interfaces are built-in
including EnDat, Hiperface, and BiSS.
High resolution A/D converters ensure optimal current loop performance. Both isolated and highspeed
non-isolated I/O are provided. For safety critical applications, redundant power stage enable
inputs can be employed.

XEL

Control Modes
• Cyclic Synchronous Position-Velocity-Torque (CSP, CSV, CST)
• Profile Position-Velocity-Torque, Interpolated Position, Homing
• Camming, Gearing
• Indexer
Command Interface
• CAN application layer over EtherCAT (CoE)
• ASCII and discrete I/O
• Stepper commands
• ±10V position/velocity/torque (2 inputs)
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
Communications
• EtherCAT
• RS-232
Accessories
• External regen resistors
• External edge filter
Feedback
• Digital quad A/B encoder
Analog sin/cos incremental
Panasonic Incremental A Format
• SSI, EnDat, Absolute A
Tamagawa & Panasonic Absolute A
Sanyo Denki Absolute A,
BiSS,BiSS
• Aux. encoder / encoder out
• Resolver option
• Digital Halls
Safe Torque Off (STO)
• Two active inputs enable power stage
• One output confirms power stage status
I/O Digital
• 15 inputs, 6 outputs
I/O Analog
• 2, 16-bit inputs
• 1, 12-bit input
• 1, 12-bit output
Dimensions: in [mm]
• 7.9 x 5.5 x 2.3 [202 x 139 x 52]
|
Model |
VAC |
IC |
IP |
|
XEL-230-18 |
100-240 |
6 |
18 |
|
XEL-230-36 |
100-240 |
12 |
36 |
|
XEL-230-40 |
100-240 |
20 |
40 |
Add -R for resolver feedback option.
DESCRIPTION
Xenus Plus set new levels of performance, connectivity, and flexibility. Ethernet based EtherCAT
operates in CAN application layer over EtherCAT (CoE) mode. A wide range of absolute interfaces
are built-in including EnDat, and BiSS.
High resolution A/D converters ensure optimal current loop performance. Both isolated and highspeed
non-isolated I/O are provided. For safety critical applications, redundant power stage enable
inputs can be employed.

Xenus Plus Compact CANopen XPC

CONTROL MODES
• Profile Position-Velocity-Torque, Interpolated Position, Homing
• Indexer, Point-to-Point, PVT
• Camming, Gearing
COMMAND INTERFACE
• CANopen
• ASCII and discrete I/O
• Stepper commands
• ±10V position/velocity/torque
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
COMMUNICATIONS
• CANopen
• RS-232
FEEDBACK Incremental
• Digital quad A/B encoder
• Analog sin/cos encoder
• Panasonic Incremental A
• Aux. encoder / encoder out Absolute
• SSI
• EnDat 2.1 & 2.2
• Absolute A
• Tamagawa Absolute A
• Panasonic Absolute A Format
• Sanyo Denki Absolute A
• BiSS (B&C)
Other
• Digital Halls
I/O DIGITAL
• 6 High-speed inputs
• 1 Motor over-temp input
• 4 Opto-isolated inputs
• 1 High-speed output
• 3 Opto-isolated outputs
• 1 Opto-isolated motor brake output
I/O ANALOG
• 1 Reference input, 12-bit
SAFE TORQUE OFF (STO)
• SIL 3, Category 3, PL d
DIMENSIONS: IN [MM]
• 7.54 x 4.55 x 2.13 [191.4 x 115.6 x 54.1]
|
Model |
VAC |
IC |
IP |
|
XPC-230-09 |
100-240 |
3 |
9 |
|
XPC-230-12 |
100-240 |
6 |
12 |
|
XPC-230-15 |
100-240 |
7.5 |
15 |
Add -R to the part number for resolver feedback
DESCRIPTION
XPC sets new levels of performance, connectivity, and flexibility.
CANopen communication provides a widely used cost-effective industrial bus.
A wide range of absolute encoders are supported.
High resolution A/D converters ensure optimal current loop performance.
Both isolated and high-speed non-isolated I/O are provided.
For safety critical applications, redundant power stage enable inputs can be employed.

Xenus Plus 2-Axis CANopen XP2
CONTROL MODES
• Indexer, Point-to-Point, PVT
• Camming, Gearing
• Position, Velocity, Torque
COMMAND INTERFACE
• CANopen
• ASCII and discrete I/O
• Stepper commands
• ±10V position/velocity/torque (2 inputs)
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
COMMUNICATIONS
• CANopen
• RS-232
FEEDBACK Incremental
• Digital quad A/B encoder
• Analog sin/cos encoder
• Panasonic Incremental A
• Aux. encoder / encoder out Absolute
• SSI • EnDat 2.1 & 2.2
• Absolute A
• Tamagawa Absolute A
• Panasonic Absolute A Format
• BiSS (B&C)
Other
• Digital Halls
I/O DIGITAL
• 12 High-speed inputs
• 2 Motor over-temp inputs
• 8 Opto-isolated inputs
• 5 Opto-isolated outputs
• 2 Opto-isolated motor brake outputs
I/O ANALOG
• 2 Reference inputs, 14-bit
SAFE TORQUE OFF (STO)
• SIL 3, Category 3, PL d
DIMENSIONS: IN [MM]
• 9.24 [234.7] x 5.42 [137.6] x 3.59 [91.1]
|
Model |
VAC |
IC |
IP |
|
XP2-230-20 |
100-240 |
10 |
20 |
Add -R to model number for resolver option
DESCRIPTION
XP2 sets new levels of performance, connectivity, and flexibility.
CANopen communication provides a widely used cost-effective industrial bus.
A wide range of absolute encoders are supported.
High resolution A/D converters ensure optimal current loop performance.
Both isolated and high-speed non-isolated I/O are provided.
For safety critical applications, redundant power stage enable inputs can be employed.
資料來源: https://www.copleycontrols.com/wp-content/uploads/2018/02/XP2_DS.pdf

Xenus Plus 2-Axis EtherCAT XE2

CONTROL MODES
• Indexer, Point-to-Point, PVT
• Camming, Gearing
• Position, Velocity, Torque
COMMAND INTERFACE
• CANopen application protocol over EtherCAT (CoE)
• ASCII and discrete I/O
• Stepper commands
• ±10V position/velocity/torque (2 inputs)
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
COMMUNICATIONS
• EtherCAT
• RS-232
FEEDBACK Incremental
• Digital quad A/B encoder
• Analog Sin/Cos encoder
• Panasonic Incremental A Format
• Sanyo Denki Wire-saving Incremental
• Aux. encoder / encoder out Absolute
• SSI • EnDat 2.1 & 2.2
• Absolute A
• Tamagawa Absolute A
• Panasonic Absolute A Format
• Sanyo Denki Absolute A
• BiSS (B&C)
Other
• Digital Halls
I/O DIGITAL
• 12 High-speed inputs
• 2 Motor over-temp inputs
• 8 Opto-isolated inputs
• 5 Opto-isolated outputs
• 2 Opto-isolated motor brake outputs
I/O ANALOG
• 2 Reference inputs, 14-bit
SAFE TORQUE OFF (STO)
• SIL 3, Category 3, PL d
DIMENSIONS: IN [MM]
• 9.24 x 5.42 x 3.59 [234.7 x 137.6 x 91.1]
|
Model |
VAC |
IC |
IP |
|
XE2-230-20 |
100-240 |
10 |
20 |
Add -R to model number for resolver option
DESCRIPTION
XE2 sets new levels of performance, connectivity, and flexibility.
CANopen application protocol over EtherCAT (CoE) communication provides a widely used cost-effective industrial bus.
A wide range of absolute encoders are supported.
High resolution A/D converters ensure optimal current loop erformance.
Both isolated and high-speed nonisolated I/O are provided.
For safety critical applications, redundant power stage enable inputs can be employed.
An integral fan and heatsink enable the drive to deliver the continuous output currents in any mounting orientation.
And, the internal regeneration resistor dissipates the energy returned by load decelerations.

Xenus Plus Compact EtherCAT XEC

CONTROL MODES
• Cyclic Synchronous Position-Velocity-Torque (CSP, CSV, CST)
• Profile Position-Velocity-Torque, Interpolated Position, Homing
• Indexer, Point-to-Point, PVT
• Camming, Gearing
• Position, Velocity, Torque
COMMAND INTERFACE
• CANopen application protocol over EtherCAT (CoE)
• ASCII and discrete I/O
• Stepper commands
• ±10V position/velocity/torque
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
COMMUNICATIONS
• EtherCAT
• RS-232
FEEDBACK Incremental
• Digital quad A/B encoder
• Analog sin/cos encoder
• Panasonic Incremental A
• Aux. encoder / encoder out Absolute
• SSI
• EnDat 2.1 & 2.2
• Absolute A
• Tamagawa Absolute A
• Panasonic Absolute A Format
• Sanyo Denki Absolute A
• BiSS (B&C)
Other
• Digital Halls
• Resolver (-R option)
I/O DIGITAL
• 6 High-speed inputs
• 1 Motor over-temp input
• 4 Opto-isolated inputs
• 1 High-speed output
• 3 Opto-isolated outputs
• 1 Opto-isolated motor brake output
I/O ANALOG
• 1 Reference input, 12-bit
SAFE TORQUE OFF (STO)
• SIL 3, Category 3, PL d
DIMENSIONS: IN [MM]
• 7.54 x 4.55 x 2.13 [191.4 x 115.6 x 54.1]
|
Model |
VAC |
IC |
IP |
|
XEC-230-09 |
100-240 |
3 |
9 |
|
XEC-230-12 |
100-240 |
6 |
12 |
|
XEC-230-15 |
100-240 |
7.5 |
15 |
Add -R to the part number for resolver feedback
DESCRIPTION
XEC sets new levels of performance, connectivity, and flexibility.
CANopen application protocol over EtherCAT (CoE) communication provides a widely used cost-effective industrial bus.
A wide range of absolute encoders are supported.
High resolution A/D converters ensure optimal current loop performance.
Both isolated and high-speed non-isolated I/O are provided.
For safety critical applications, redundant power stage enable inputs can be employed.
資料來源: https://www.copleycontrols.com/wp-content/uploads/2018/02/XEC-ds.pdf

Xenus Plus MACRO XML

Control Modes
• Indexer, Point-to-Point, PVT
• Camming, Gearing
• Position, Velocity, Torque
Command Interface
• MACRO
• ASCII and discrete I/O
• Stepper commands
• ±10V position/velocity/torque (2 inputs)
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
Communications
• MACRO
• RS-232
Accessories
• External regen resistors
• External edge filter
Feedback
• Digital quad A/B encoder
• EnDat, Hiperface, BiSS, SSI, & Panasonic encoders
• Aux. encoder / encoder out
• Analog sin/cos encoder
• Resolver option
• Digital Halls
Safe Torque Off (STO)
• Two active inputs enable power stage
• One output confirms power stage status
I/O Digital
• 15 inputs, 6 outputs
I/O Analog
• 2, 16 bit inputs
• 1, 12 bit input
• 1, 12 bit output
Dimensions: in [mm]
• 7.92 x 5.51 x 2.31 in (201.2 x 139.9 x 58.7 mm)
|
Model |
VAC |
IC |
IP |
|
XML-230-18 |
100-240 |
6 |
18 |
|
XML -230-36 |
100-240 |
12 |
36 |
|
XML -230-40 |
100-240 |
20 |
40 |
Add -R for resolver feedback option.
DESCRIPTION
Xenus Plus MACRO set new levels of performance, connectivity, and flexibility via the MACRO interface.
A wide range of absolute interfaces are built-in including EnDat, Hiperface, and BiSS.
High resolution A/D converters ensure optimal current loop performance.
Both isolated and highspeed non-isolated I/O are provided.
For safety critical applications, redundant power stage enable inputs can be employed.

Xenus Plus 2-Axis MACRO XM2

CONTROL MODES
• Indexer, Point-to-Point, PVT
• Camming, Gearing
• Position, Velocity, Torque
COMMAND INTERFACE
• MACRO
• ASCII and discrete I/O
• Stepper commands
• ±10V position/velocity/torque (2 inputs)
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
COMMUNICATIONS
• MACRO
• RS-232
FEEDBACK INCREMENTAL
• Digital quad A/B encoder
• Analog sin/cos encoder
• Panasonic Incremental A
• Aux. encoder / encoder out Absolute
• SSI
• EnDat 2.1 & 2.2
• Absolute A
• Tamagawa Absolute A
• Panasonic Absolute A Format
• BiSS (B&C)
Other
• Digital Halls
I/O DIGITAL
• 12 High-speed inputs
• 2 Motor over-temp inputs
• 8 Opto-isolated inputs
• 5 Opto-isolated outputs
• 2 Opto-isolated motor brake outputs
I/O ANALOG
• 2 Reference inputs, 14-bit
SAFE TORQUE OFF (STO)
• SIL 3, Category 3, PL d
DIMENSIONS: IN [MM]
• 9.24 x 5.42 x 3.59 [234.7 x 137.6 x 91.1]
|
Model |
VAC |
IC |
IP |
|
XM2-230-20 |
100-240 |
10 |
20 |
DESCRIPTION
The XM2 Xenus Plus 2-Axis MACRO is a high-performance,
AC powered drive for torque and velocity control of brushless and brush motors via MACRO (Motion And Control Ring Optical).
MACRO is a high bandwidth, nonproprietary fiber optic or wired field bus protocol for machine control networks.
Connections to a MACRO ring are via SC-type fiber optic connectors.
MACRO address selection is via two rotary switches for Master and Node addresses.
The XM2 Xenus Plus 2-Axis MACRO set new levels of performance, connectivity, and flexibility via the MACRO interface.
A wide range of absolute interfaces are built-in including EnDat, SSI, BiSS, and Absolute A.
High resolution A/D converters ensure optimal current loop performance.
Both isolated and high-speed non-isolated I/O are provided.
For safety critical applications, redundant power stage enable inputs (STO) can be employed.
In addition to the MACRO interface, torque and velocity control is also supported via an analog input with a ±10 Vdc range.
資料來源: https://www.copleycontrols.com/wp-content/uploads/2018/02/XM2_DS.pdf

Xenus R10

AFS ADVANCED FEATURE SET
• BiSS-C Unidirectional encoder, SSI (Consult factory)
• 32-bit floating point filters
• Multiple advanced filters
• Frequency analysis tools
CONTROL MODES
• Fast indexer, Point-to-Point, PVT, CSP
• Camming, Gearing, Position, Velocity, Torque
COMMAND INTERFACE
• CANopen
• ASCII Serial Binary and discrete I/O
• Stepper commands Single-ended or Differential selectable
• ±10V position/velocity/torque command
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
COMMUNICATIONS
• CANopen
• RS-232
• RS-422 (Optional)
FEEDBACK
• Digital quad A/B encoder
• Analog Sin/Cos encoder (-S versions)
• Resolver (-R versions)
• Secondary encoder / emulated encoder out
• Digital Halls
I/O - DIGITAL
• 12 inputs, 4 outputs
ACCESSORIES
• External regen resistors
• External edge filter
DIMENSIONS: mm [in]
• 192 x 142 x 65 [7.6 x 5.6 x 2.6]
|
Model |
VAC |
IC |
IP |
|
R10-230-18 |
100-240 |
6 |
18 |
|
R10 -230-36 |
100-240 |
12 |
36 |
|
R10 -230-40 |
100-240 |
20 |
40 |
Add -S to part numbers above for Sin/Cos feedback
Add -R for resolver feedback
DESCRIPTION
REV 01 below the model number on the label indicates Xenus R10 with the advanced feature set.
It is a ruggedized AC powered servo drive for position, velocity, and torque control of AC brushless and DC brush motors.
It operates on a distributed control network, as a stand-alone indexing drive, or with external motion controllers.
Indexing mode simplifies operation with PLC’s that use outputs to select and launch indexes and inputs to read back drive status.
A single serial port on the PLC can send ASCII data to multiple drives to change motion profiles as machine requirements change.
CAN bus operation supports Profile Position, Profile Velocity, Profile Torque, Interpolated Position, and Homing.
Up to 127 Xenus R10 drives can operate on a single CAN bus and groups of drives can be linked via the CAN so that they execute motion profiles together.
Operation in torque (current), velocity, and position modes with external motion controllers is supported.
Input command signals are ±10 Vdc (torque, velocity, position), PWM/Polarity (torque, velocity), or Step/Direction (position).
RUGGEDIZED STANDARDS CONFORMANCE
Ambient Temperature Non-Operating -50ºC to 85ºC
Operating -40ºC to 70ºC
Thermal Shock Operating -40ºC to 70ºC in 1 minute
Relative Humidity Non-Operating 95% non-condensing at 60ºC
Operating 95% non-condensing at 60ºC
Vibration Operating 5 Hz to 500 Hz, up to 3.85 grms
Altitude Non-Operating -400 m to 12,200 m
Operating -400 m to 5,000 m
Shock Crash Safety 75 g peak acceleration
Operating 40 g peak acceleration
MIL-STD specifications MIL-STD- 461, 704, 810, 1275, 1399
IEC specifications IEC- 60068, 60079
資料來源: https://www.copleycontrols.com/wp-content/uploads/2018/09/R10-REV01-ds.pdf

Xenus R11

FEEDBACK VERSIONS
• Analog Sin/Cos
• Quad A/B digital
• Resolver
CONTROL MODES
• Indexer, Point-to-Point, PVT
• Camming, Gearing, Position, Velocity, Torque
COMMAND INTERFACE
• CANopen
• ASCII and discrete I/O
• Stepper commands
• ±10 Vdc position/velocity/torque command
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
• Digital inputs for indexer control
COMMUNICATIONS
• CANopen
• RS232
• RS-422 (optional)
FEEDBACK
• Digital Quad A/B encoder
• Analog sin/cos encoder (-S versions)
• Resolver (-R versions)
• Secondary encoder / emulated encoder out
• Digital Halls
I/O - DIGITAL
• 14 inputs, 4 outputs
REGEN
• Internal
DIMENSIONS: mm [in]
• 126 x 90 x 53 [5.0 x 3.5 x 2.1]
|
Model |
VAC |
IC |
IP |
|
R11-230-02 |
100-240 |
1 |
2 |
|
R11 -230-06 |
100-240 |
3 |
6 |
|
R11 -230-10 |
100-240 |
5 |
10 |
Add “-S” to part number for Sin/Cos version
Add “-R” for Resolver version
DESCRIPTION
Xenus R11 is a compact, ruggedized, AC powered servo drive for position, velocity,
and torque control of AC brushless and DC brush motors.
It operates on a distributed control network, as a stand-alone indexing drive, or with external motion controllers.
Indexing mode simplifies operation with PLC’s that use outputs to select and launch indexes and inputs to read back drive status.
A single serial port on the PLC can send ASCII data to multiple drives to change motion profiles as machine requirements change.
CAN bus operation supports Profile Position, Profile Velocity, Profile Torque, Interpolated Position, and Homing.
Up to 127 Xenus R11 drives can operate on a single CAN bus and groups of drives can be linked via the CAN so that they execute motion profiles together.
Operation in torque (current), velocity, and position modes with external motion controllers is supported.
Input command signals are ±10 Vdc (torque, velocity, position), PWM/Polarity (torque, velocity), or Step/Direction (position).
RUGGEDIZED STANDARDS CONFORMANCE
Ambient Temperature Non-Operating -50ºC to 85ºC
Operating -40ºC to 70ºC
Thermal Shock Operating -40ºC to 70ºC in 1 minute
Relative Humidity Non-Operating 95% non-condensing at 60ºC
Operating 95% non-condensing at 60ºC
Vibration Operating 5 Hz to 500 Hz, up to 3.85 grms
Altitude Non-Operating -400 m to 12,200 m
Operating -400 m to 5,000 m
Shock Crash Safety 75 g peak acceleration
Operating 40 g peak acceleration
MIL-STD specifications MIL-STD- 461, 704, 810, 1275, 1399
IEC specifications IEC- 60068, 60079