-
 ACS
ACS
。運動控制器
。軸卡 -
 。步進驅動器
。步進驅動器
。伺服驅動器 -
 。伺服馬達
。伺服馬達
。步進馬達
。音圈馬達
。線性馬達
。直驅馬達 -
 。回授元件
。回授元件
。光學尺
。磁性尺
。顯示器
。編碼器
。Linear Encoder -
 New Way
New Way
。空氣軸承
。Air conveyor -
 。多孔性陶瓷真空吸盤
。多孔性陶瓷真空吸盤
-
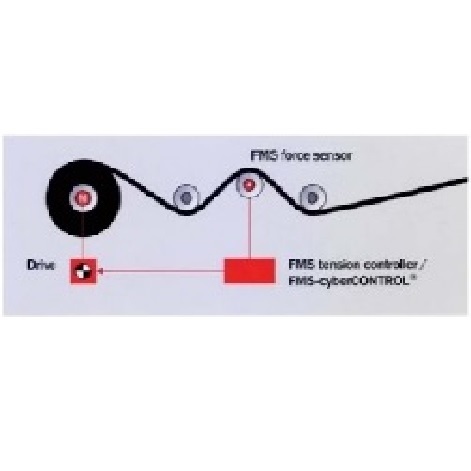 FMS
FMS
。張力控制器
。張力放大器
。張力感測器 -
 HarmonicDrive®
HarmonicDrive®
。諧波減速機
。直驅電動機
。旋轉執行元件 -
 。減速機
。減速機
。齒輪齒排 -
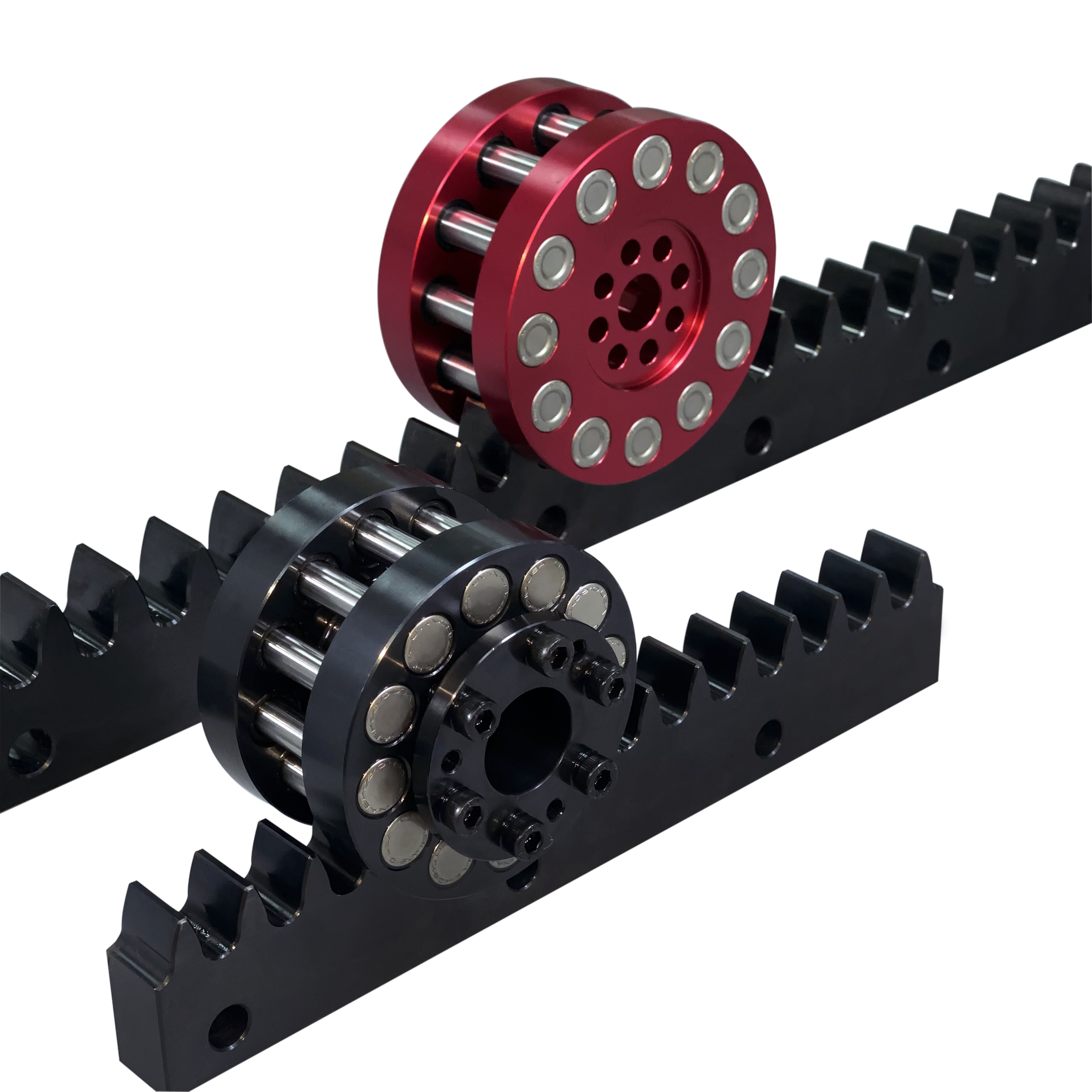 Sejin
Sejin
。齒輪齒排 -
 SANYO DENKI
SANYO DENKI
。San Ace 冷卻系統
。SANUPS 電源系統
。SANMOTION 伺服系統 -
 。聯軸器
。聯軸器
。免鍵式軸襯 -
 。定位平台 (滑台)
。定位平台 (滑台)
。史都華平台
。Theta Hybrid Hexapod
。X-Y-Z Table -
 ALIO
ALIO
。Hybrid Hexapod -
 。次系統設備(客製)
。次系統設備(客製)
-
 。電動缸
。電動缸
。千斤頂
。升降器
。線性致動器 -
 。軸承
。軸承
。線性軸承
。線性滑台 -
 i-Autoc
i-Autoc
。固態繼電器SSR -
 Karl Klein
Karl Klein
。鼓風機 -
 特殊環境用
特殊環境用
防爆/防水/真空/
低溫/重載 -
 應用案例影片
應用案例影片
-
 庫存出清
庫存出清
ACS高階EtherCAT多軸運動控制系統
| ACS教育訓練影片 |
軟體下載:SPiiPlus-ADK-Suite-v.4.10
功能強大的網路型控制系統解決方案:
ACS開發了一系列功能強大的EtherCAT網路控制解決方案,用於滿足高性能多軸運動控制的需求。 EtherCAT控制器結合了高性能SPiiPlus運動控制和EtherCAT通訊主站。
ACS開發的EtherCAT主站運動控制器有多種類型:
‧SPiiPlus NT:嵌入到MC4U控制模組內。
‧SPiiPlus EC:獨立型控制器。
‧SPiiPlus CMba / hp:內含3軸驅動器的獨立型控制器。
‧SPiiPlus CMhv: 內含2軸驅動器的獨立型控制器。
‧SPiiPlus CMnt: 內含2軸驅動器的獨立型控制器。
‧SPiiPlus SC:運行於電腦上的軟體控制器。
EtherCAT控制器特性:
‧高於10KHZ的工作時序實現多達64軸同步控制。
‧可擴充的I/O點數。
‧開放式架構:支持ACS與經驗證過的其他廠牌EtherCAT模組。
‧多輸入多輸出(MIMO)多軸控制演算法,應用於龍門(Gantry)控制與多關節機器人控制。
‧ACS的EtherCAT模組:伺服驅動器、步進驅動器、Pulse命令輸出、I/O模組。
‧實時網路集成、安全監測與處理。
‧使用統一的軟體與開發工具。
EtherCAT系列架構:
基於ACS特有的Real-Time網路技術及EtherCAT通訊協定,可多軸同動補間,所有軸的Sampling Rate均為20KHZ,且可連接市面上具EtherCAT通訊的其它廠牌驅動器(Copley,Sanyo Denki, Yaskawa,Kollmorgen,Parker,Schneider,ServoTronix…等)。

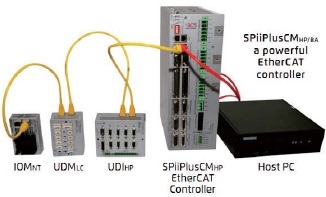
EtherCAT網路型控制系統 
一. EtherCAT網路型控制主機(EtherCAT Master):
 |
 |
 |
 |
 |
 |
 |
|
|---|---|---|---|---|---|---|---|
| 產品型號 | SPiiPlus EC | SPiiPlus CMxa | SPiiPlus MC4Unt | SPiiPlus CMba/hp | SPiiPlus CMhv | SPiiPlus CMnt | SPiiPlus SC |
| PDF下載 | Datasheet | Datasheet | Datasheet | Datasheet | Datasheet | Datasheet | |
| 類型 | 硬體型 | 硬體型 | 硬體型 | 硬體型 | 硬體型 | 硬體型 | 軟體型 |
|
內建最多 軸數 |
0 | 3 | 8 | 3 | 2 | 2 | 0 |
| 最多軸數(含本身與網路) | 64 | 64 | 32 | 32 | 32 | 32 | 64 |
| 內含驅動器最多數量 | 0 | 3 | 8 | 3 | 2 | 2 | 0 |
| MPU cycle rate | 1,2,4,5KHZ | 1,2,4,5KHZ | 1,2KHZ | 1,2KHZ | 1,2KHZ | 1,2KHZ | 1,2,4,5KHZ |
| 回授類型 | Increment Sin-Cos EnDAT 2.2&2.1 Smart Abs Panasonic BiSS-A/B/C SSI | Increment Sin-Cos EnDAT 2.2&2.1 Smart Abs Panasonic BiSS-C | Increment Sin-Cos EnDAT 2.2&2.1 Smart Abs Panasonic BiSS-A/B/C SSI | Increment Sin-Cos EnDAT 2.2&2.1 Smart Abs Panasonic Hiperface Resolver Biss-A/B/C SSI | Increment Sin-Cos EnDAT 2.2&2.1 Smart Abs Panasonic Hiperface Resolver Biss-A/B/C SSI | ||
| 通訊介面 | 1xEthernet 2xRS232 2xEtherCAT | 1xEthernet 2xRS232 1xEtherCAT | 1xEthernet 2xRS232 1xEtherCAT | 1xEthernet 2xRS232 1xEtherCAT | 1xEthernet 2xRS232 1xEtherCAT | 1xEthernet 2xRS232 1xEtherCAT | Shared RAM |
二. EtherCAT網路型驅動器(EtherCAT Slave):(從站,限定搭配 ACS 上位控制器)
 |
 |
 |
 |
 |
 |
 |
 |
|
 |
||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 產品型號 | SPiiPlus UDMlc | SPiiPlus UDMpc | SPiiPlus UDMnt | SPiiPlus UDMmc | SPiiPlus UDMba/hp | UDMxa | SPiiPlus UDMhv | SPiiPlus UDMpm | SPiiPlus MC4Udc | SPiiPlus SDMnt | |
| PDF下載 | Datasheet | Datasheet | Datasheet | Datasheet | Datasheet | Datasheet | Datasheet | Datasheet | Datasheet | Datasheet | |
| 軸數 | 2/4 | 1/2 | 1/2 | 2/4 | 1/2/3 | 1/2/3 | 1/2 | 1/2 | 1/8 | 4/8 | |
| 馬達電壓入力 | 12-48VDC | 24-48VDC | 12-80VDC | 12-80VDC | 85-265VAC | 85-265VAC | 230VAC | 230-480VAC | 85-265VAC | 85-265VAC | 12-40VDC(D型) |
| 控制電壓入力 | 15-48VDC | 24VDC | 24VDC | 24VDC | 24VDC | 24VDC | 24VDC | 24VDC | 95-240VAC(A型) | ||
| 驅動器電流 | 1.25-2.5A(4軸) 2.5-5A(4軸) 5-10A(2軸) |
2.5-5A 5-10A 10-20A |
2.5-5A 5-10A 10-20A |
2.5-5A 5-10A 10-20A 20-40A |
5-10A 10-20A 15-30A |
5-10A 10-20A 15-30A |
230VAC 型: 5-15A ˴10-30A 15-45A ˴20-60A |
230-480VAC 型: 5-10A ˴10-20A ˴ 15-30A |
2.5-5A 5-10A 7.5-15A |
5-10A 10-20A 20-40A |
20-40A 3A |
| 可驅動馬達類型 | 伺服 無刷 有刷 步進 |
伺服 無刷 有刷 步進 |
伺服 無刷 有刷 步進 |
伺服 無刷 有刷 步進 |
伺服 無刷 有刷 步進 AC 感應 |
伺服 無刷 有刷 步進 AC 感應 |
伺服 無刷 有刷 步進 AC 感應 |
伺服 無刷 有刷 步進 AC 感應 |
伺服 無刷 有刷 步進 AC 感應 |
步進 | |
| 回授類型 | Increment EnDAT2.2 & 2.1 Smart Abs Panasonic BiSS-A/B/C SSI
|
Increment EnDAT2.2 & 2.1 Smart Abs Panasonic BiSS-A/B/C SSI Sin-Cos |
Increment EnDAT2.2 &2.1 Smart Abs Panasonic BiSS-C SSI Sin-Cos |
Increment EnDAT2.2 &2.1 Smart Abs Panasonic BiSS-C SSI |
Increment EnDAT2.2 &2.1 Smart Abs Panasonic BiSS-C SSI Sin-Cos |
Increment EnDAT2.2 &2.1 Smart Abs Panasonic BiSS-C SSI Sin-Cos |
Increment EnDAT2.2 &2.1 Smart Abs Panasonic BiSS-A/B/C SSI Sin-Cos Hiperface Resolver |
Increment EnDAT2.2 &2.1 Smart Abs Panasonic BiSS-A/B/C SSI Sin-Cos Hiperface Resolver |
Increment EnDAT2.2 &2.1 Smart Abs Panasonic BiSS-C Sin-Cos |
||
三. EtherCAT網路型命令介面(EtherCAT Slave):
 |
 |
|
 |
|
|---|---|---|---|---|
| 產品型號 | SPiiPlus UDI | SPiiPlus PDMnt | SPiiPlus UDMnt | SPiiPlus PDIcl |
| PDF下載 | Datasheet | Datasheet | Datasheet | |
| 軸數 | 2/4 | 4 | 4 | 2/4 |
| 命令類型 | ±10V | Pulse/Dir (Pulse 頻率4MHz) | Pulse/Dir (LC1 Laser Control Mode) | Pulse/Dir (Pulse 頻率4MHz) |
| 回授類型 | Increment Sin-Cos EnDAT 2.2 & 2.1 Smart Abs Panasonic BiSS-A/B/C SSI | Increment EnDAT 2.2 & 2.1 Smart Abs Panasonic BiSS-A/B/C SSI |
四. EtherCAT網路型I/O模組(EtherCAT Slave):
 |
|
|---|---|
| 產品型號 | SPiiPlus IOMnt |
| PDF下載 | Datasheet |
| I/O 點數 | 8/8 , 16/16 , 32/16 , 32/32 |
| 電壓入力 | 24VDC |
龍門平台高階運動控制應用
變動性重心對策:
Controlling Gantry tables with croos moving axis(有效解決croos moving mass問題)
當龍門軸X1/X2(Gantry axes)與正交軸Y(Cross axis)同時運動時,運動中的正交軸Y會影響龍門軸 X1/X2運動的穩定性,ACS控制器的龍門運動控制演算法已可解決此問題。
當正交軸Y的負載位置改變時,整個龍門機構的重心(COG:Center Of Gravity)都會隨之改變,ACS 控制器具有即時補償演算法可消除此種影響。
以下就ACS龍門運動控制演算法對大型龍門平台的實際應用作一說明。
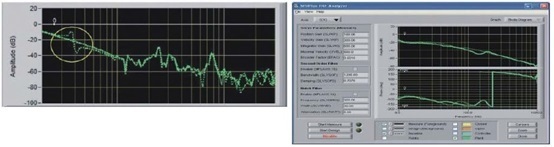
當正交軸負載位於機構側邊時,經常會出現共鳴(共振)問題的區域是38Hz。當龍門機構的重心(CGO)改變時, 共鳴(共振)特性也會隨之改變。低頻共鳴(共振)會降低帶寬(Bandwidth),因此會造成龍門軸的干擾(擾動)。
當正交軸負載位於機構側邊,龍門軸的波特頻響應(Bode Frequency Response)如下圖,其中虛線是未經ACS 龍門運動控制演算法補償的波形,實線是經過ACS龍門運動控制演算法及時補償的波形。自圖示波形可明 顯看出,ACS龍門運動控制演算法可消除38Hz的共鳴(共振),故帶寬(Bandwidth)可獲得提升,對龍門的干擾 也可降至最低。
變動性負載對策:
利用頻域(Frequency-Domain)分析工具對時變負載(Time-Varying Pay-loads)的調校(Tuning): 一般在進行馬達調校時,大多是用時域(Time- Domain)方法,但當運動負載是會變化且在不同負載下均要 得到優良的運動特性與運動精度時,用時域方法就會非常費時且不易得到較佳的的調校果,此時就需要 用頻域(Frequency-Domain)方法以得到較佳的調校結果。 ACS SPiiPlus控制器具備Frequency Response Function(簡稱FRF)分析工具,對於不同負載仍可獲得較佳的調校結果, 使運動特性與精度不應負載的變化而改變。
奈米級高精度運動控制
先進的NanoPWM伺服驅動器:
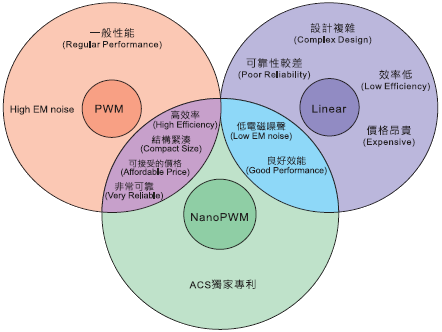
‧NanoPWM是標準PWM驅動器的線性化,基於ACS的獨特專利技術。
‧是用奈米級高精度運動控制。
‧可取代線性伺服驅動器(Linear Servo Drives)。
‧NanoPWM驅動器提供極佳的定位精度和跟隨性能,並克服了線性驅動器的缺點, 使系統具有更高的效率與可靠性。
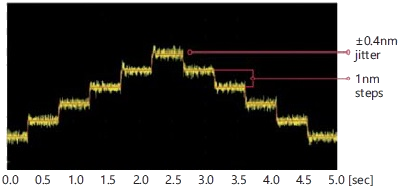
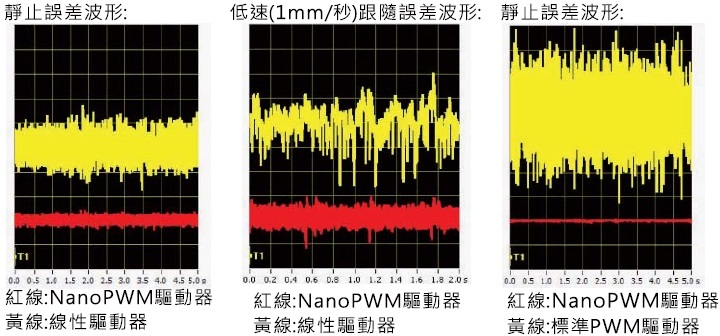
‧NanoPWM驅動器可達成極小的靜止誤差(Jitter)與跟隨誤差(Following Error)。
NanoPWM驅動器兼容標準PWM驅動器與線性驅動器的優缺點:
|
|
 |
NanoPWM驅動器搭配MC4U控制器使用:
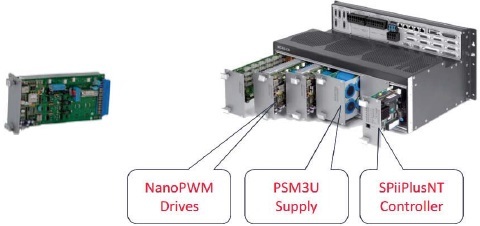
NanoPWM驅動器型號:DDM3U-1-100-15A-NP
NanoPWM驅動器規格:
‧單軸驅動器
‧BUS電壓24-100VDC
‧連續電流15A,峰值電流30A
‧連續輸出功率1.07KW,峰值輸出功率1.98KW
NanoPWM驅動器與標準PWM驅動器及線性驅動器的性能比較:
|
測試硬體: ‧MC4U控制器 ‧無鐵心線性馬達 ‧交叉滾珠軸承機構 ‧Sin / cos類比光學尺回授。
 |
 |
SPiiPlus CMhp/ba控制器規格表
|
軸數
最多32軸(透過EtherCAT連接個模組)
本身最多內建3個驅動器
MPU cycle rate:
‧4,6,8,16軸:2KHz
‧32軸:1KHz
|
數位I/O
安全輸入:
正極限、負極限、緊急停止
一般輸入:
8 Single-ended,
5Vdc(±10%) or 24Vdc(±20%),
光隔離,NPN/PNP,
Input current:14mA
高速MARK inputs:
4個,RS-422
馬達剎車輸出:
3個,24V,1A光隔離
一般輸出:
8 Single-ended,
5Vdc(±10%) or 24Vdc(±20%),
光隔離,NPN/PNP,
Max. output current 100mA
PEG(Position Event Generator):
2個PEG_Pulse,RS-422,
8個PEG_State,RS-422
模式:Incremental、Random
PEG pulse width:26.64ns-1.745ms
PEG Pulse頻率:
‧Incremental:18MHz
‧Random:10MHz
 |
Pulse/Direction介面
此介面為選配功能
數量:4
類型:RS-422
Pulse最高頻率:5MHz
Pulse寬度:0.08-80us
|
|
驅動器
電流規格與BUS電壓:
‧5/10A(85-265VAC)
‧10/20A(85-265VAC)
‧15/30A(130-265VAC)
(若選配低壓產品,則BUS電壓為17-85VAC或24-120VDC)
電流鏈波頻率
(Current ripple frequency):40KHz
電流迴路取樣頻率
(Sampling rate):20KHz
電流迴路頻寬(Bandwidth)
最大5KHz
電流解析度(Current sensing):
‧CMba:12 bit ADC
‧CMhp:16 bit ADC
換相(Commutation)模式:
Sinusoidal,有無Hall均可
保護功能:過電壓、短路、電流過載
、溫度過高…等
可接馬達種類:伺服、無刷、有刷、
步進、AC感應馬達
|
Laser介面
此介面為選配功能
類型:RS-422
Fault Input:2個
Enable Output:2個
Pulse頻率:9Hz-1181MHz
Pulse寬度:6.67ns-111ms
Duty cycle:0-100%
 |
|
|
環境
使用: 0 to +40°C
保存:-25 to +60°C
濕度:5% to 90%(非冷凝)
|
||
|
記憶體
User Memory(RAM):128MB
Non-volatile(Flash):128MB
|
||
|
通訊
Serial ports:
1個RS-232,1個RS-232/422
UP to 115,200bps
Ethernet channel:
1個,TCP/IP 10/100Mbps
EtherCAT:
2個,In&Out,100Mbit/sec,
CoE and FoE protocols support
 |
||
|
回授
數位增量型Encoder:
‧A/B、RS-422、Clock/Dir
‧頻率:50MHz
Sin-Cos類比Encoder(選配):
‧1Vpp,differential
‧頻率:250KHz
‧乘積因子(Multiplication factor):
‧CMba: x4 x4096
‧CMba: x4 x65536
‧自動補償Offset、Phase、Amplitude
絕對型Encoder(選配):EnDat2.2&2.1、Tamagawa Smart-Abs、Panasonic、Biss-A/B/C、SSi
保護功能:Encoder error、
Encoder not connect
|
||
|
類比I/O
利用伺服迴路的回授輸入:
6個,±10V,differential,
20KHz取樣頻率
解析度:CMba:12bit, CMhp:16bit
輸入:
2個,single-end, ±10V,解析度12bit
輸出:
2個,single-end, ±10V,解析度10bit
|
||
|
伺服演算法
先進的PIV演算法,可提升運動精度、
整定時間、速度平滑性、穩定性
,且具迴路濾波器、龍門控制、
雙回授控制…等。
可選配Input-Shaping、Servo-
Boost等高階演算法。
|
SPiiPlus系列控制器應用實例
ACS SPiiPlus系列運動控制器具備高精度、高速度的優異性能,故在面板、太陽能、半導體、
雷射切割…等領域,可獲得極優的加工效果。
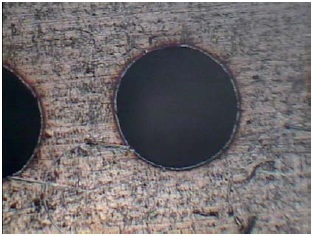
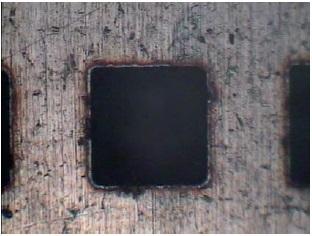
案例一.SMT鋼板雷射切割應用:
提升雷射切割速度與精度,X/Y軸使用線性馬達,光學尺解析度0.5um。
(右側圖形為顯微鏡觀測照片)
|
1. 圓孔切割:
圓孔直徑02.mm(圓與圓間距0.2mm)
切割路徑:
自圓心起刀->圓正上方->360度圓->
移至下一個圓心
加工速度: 每小時12950孔
|
 |
|
2. 方孔切割:
方孔尺寸0.2mm*0.2mm(方形與方形間距0.2mm)
切割路徑: 自方形中心起刀->方形左上角->
方形右上角->方形右下角->
方形左下角->方形左上角->
移至下一個方形中心
加工速度: 每小時8100孔
|
 |
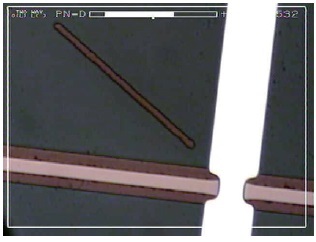
案例二.改善FPD雷射修補X/Y補間直線度:
X/Y軸使用線性馬達,光學尺解析度0.1um。
同一機構,使用ACS控制器後X/Y直線度明顯改善。(下列圖形為顯微鏡觀測照片)
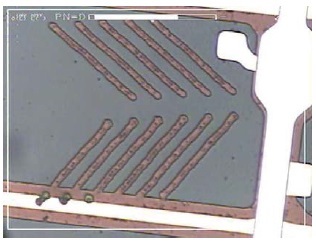 |
左側為使用它牌控制器的圖形,
右側為使用ACS控制器的圖形
|
 |
|
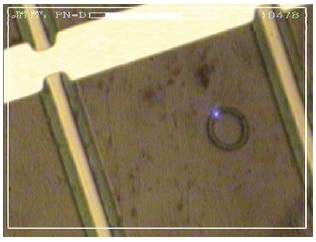
右側圖形為直徑只有10um的圓,就雷射軌跡可看出仍是一個正圓
|
 |
|
|
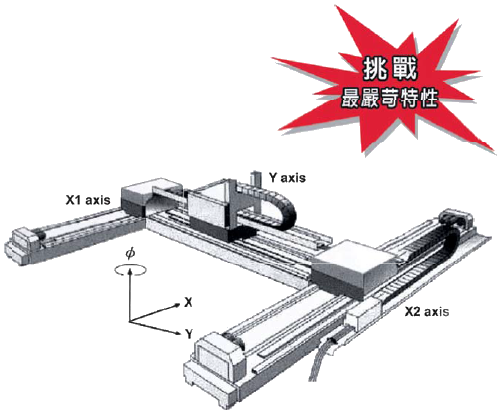
挑戰最嚴苛的伺服運動控制
Gantry龍門同動 [運動系統]
可達奈米等級之精度要求
完成高速運動之龍門系統,1.5米 / sec.
精確之速度穩定度200mm / sec±0.1%速度誤差
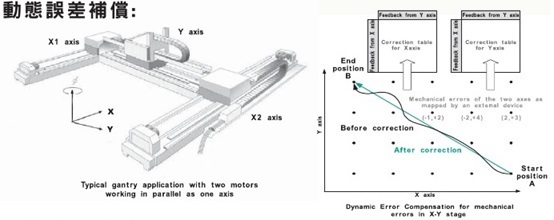
內建X.Y動態誤差補償
搭配雷射干涉儀使用,補償後
干涉儀不須留置機器上。
成功案例:雷射修補(Laser Repair)、雷射切割(Laser cutting)
彩色濾光片塗佈(color filter coating)、CCD檢測(CDD inspection)
精密量測(Precision Measuring Machines)…系統
適用範圍: 半導體設備、TFT設備、PCB設備
|
 |
龍門定位穩態精度,Jitter為 ±1至 ±2Counts,即 ±5至 ±10nm
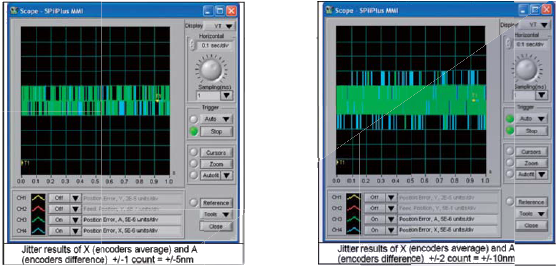
視波器顯示±5nm(±1count) 視波器顯示±10nm(±2count)
|
・伺服迴路修正時間: 50µ / 每一軸
・最高數位Encoder回授速度: 60MHZ
・最高類比Sin Cos Encoder回授速度:2.5MHZ(類比信號)
類比Encoder解析:65536 / cycle
・高速input延遲時間<0.1µs
・高速位置輸出(output)延遲時間<0.1µs
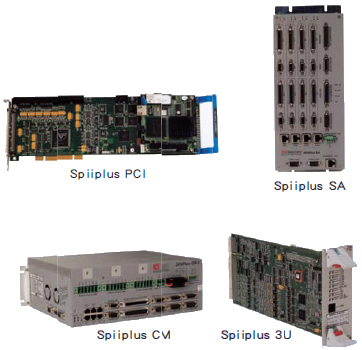
・提供PCI Bus及Stand alone不同類型控制器
・程式語言: C, C++, VB, LabVIEW, ACSPL+,
或搭配Host PC
使用DLL或COM libraies(部分機種支援PLC…語言)
・行進中可改變速度、加速度、jerk、及目標位置,
滿足各種運動控制功能要求
|
 |
SPiiPlus系列控制器特點 

專為效能設計的強大控制平台(Powerful Platform Designed for Performance):
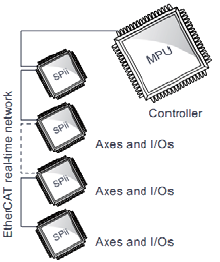
ACS高效能控制性統由SPiiPlus EtherCAT控制主站MPU(motion Processor Unit)
與每個SPiiPlus EtherCAT從站上的伺服處理器(SPii)組成,達到以下優異特點:
・所有SPiiPlus系列EtherCAT網路型控制器均可Stand-Alon獨立工作。
・每軸的伺服迴路取樣頻率(更新頻率)均為20KHZ。
・具高階速度前瞻(Look-Ahead)演算法。
・支援多種運動模式,包含點對點(Point-to-point)、寸動(Jog)、PVT運動、主從跟隨(Master-Slave)
、連續路徑(Segmented Motion)、電子凸輪(CAM)等。
・具符合IEC61131-3規範的PLCopen程式語法。
・可透過EtherCAT網路擴充數位式I/O與類比式I/O。
・具觸發反應時間低於0.1µs的高速位置事件產生器(PEG)及高速輸入(MARK)。
・具1D / 2D / 3D精度補償功能(Error Mapping,Dynamic Error Compensation),可大幅提高運動精度。
・具正向(Forward)與反向(Inverse)的運動演算法(Kinematics)。
・具雙回授(Dual-Loop)控制功能。
・數位回授輸入頻率最高可達60MHZ。
・通訊介面具有TCP / IP 10 / 100 / 1000Mbps(使用1000Mbps通訊時需用CAT6線材)、Modbus / TCP、
RS-232、Ethernet / IP。
・具多工即時程式語言(ACSPL+)。
・EtherCAT網路型控制器最多可串聯64軸(各模組間通訊線材長度可達50米)。
・具雷射控制模組(LC1,Laser Control Module) : Pulse frequency 9HZ to 1.181Mhz,Pulse width
6.67ns to 111ms,Duty cycle 0 to 100%。
・具步進馬達閉迴路(Close-Loop)控制功能。
・具NetworkBoost功能:EtherCAT網路偵錯與回復(Recovery)。
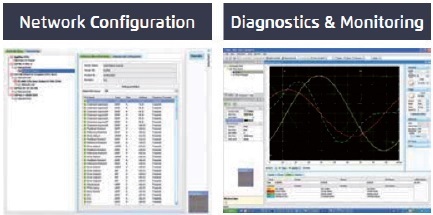
SPiiPlus MMI Application Studio使用者介面:

MMI軟體為控制器、驅動器、I/O、EtherCAT網路配置、伺服調試與監控提供了一個方便
使用的介面。MMI包含了ACSPL+程式開發環境、具FFT功能的8通道軟體示波器(SCOPE)
、頻率響應函數分析器(FRF)…等多項工具軟體。
ACSPL+功能強大簡單易用的運動控制程式語言:
・支援多工(Multi-Tasking)實時(Real-Time)。
・最多可同步執行64個執行緒(Thread)。
・運動中可改變目標位置及運動參數(速度、加減速等) 。
・64位元浮點運算。
・支援G-code功能(符合RS-274D / ISO-6983國際標準),G-code指令可與ACSPL+指令同時使用。
優異先進的龍門同動控制(Gantry Control):

・具多輸入多輸出(MIMO)解耦控制(Decoupled):同時控制重心軸及偏擺軸(Yaw)。
・動態補償偏擺(Yaw)角度。
・自動進行力量 / 回授調整。
・同時適用於剛性(Stiff)與柔性(Flexible)龍門機構。
・更高的帶寬(Bandwidth)、更佳的穩定性(Stability)、最小的軸互相干擾(Corsstalk)。
SPiiPlus系列控制器特點
ServoBoost-實現前所未有的性能:
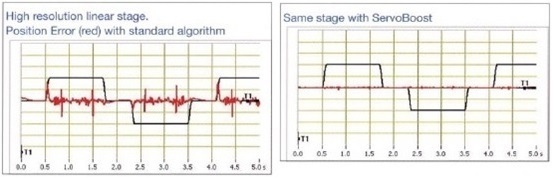
標準的伺服演算法可以達到很好的性能,包括整定時間、均速性、靜止穩定性。
然而當需要更高的性能時,ServoBoost技術就是首選。經由ServoBoost應用,可以達到更好、
更穩定和一致性的伺服性能。
在以下情況可以考慮使用ServoBoost技術:
‧需要極高的均勻速度精確性。(ServoBoost一般可以提升5倍性能)
‧需要奈米級的伺服靜止穩定性(Jitter)
‧系統負載與動態特性發生很大變化時,ServoBoost可以自動適應以達到一致性的性能。
‧系統性能受限於低頻共振點時,ServoBoost可以自動補償。
‧系統複雜度使標準伺服演算法不能達所需的頻寬(Band-Width)時(例如低剛性,大慣量)。
頻率響應函數(FRF:Frequency Response Function)分析器-測量與優化系統的響應特性
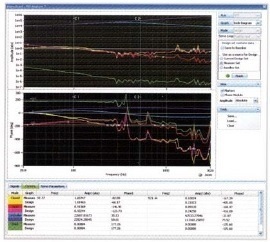
FRF是一個功能強大的圖形化伺服分析工具,應用FRF工具可以測量高達10KHz的系統頻率響應,
並據以優化系統性能。
FRF可以協助分析實現:
‧檢測和補償系統共振點。
‧通過增加頻寬提升系統效率
‧增加統穩定性
‧測量相似系統(如同型機器)的差異點。
‧檢測系統性能的變化(因長期使用造成機構剛性的改變)。
SPiiPlus simulator-SPiiPlus模擬器可以極大的縮短開發時間:
ACS軟體工具提供了一個獨特的模擬器,可以在不需任何硬體即可開發主機程式及運動控制程式。
可以應用ACSPL+程式或SPiiPlus Library模擬輸入、輸出、安全警報、錯誤訊息等,大幅縮短系統開發時間。
SPiiPlus Library-用於主機程式開發的高級API函式庫:
SPiiPlus Library支持多通道通訊和多執行序應用,可同時支持16個通道和通過
Call-Back函式中斷。一個應用程式可以與多個控制器通訊或多個應用程式與一個控制器通訊。
通訊介面可以是PCI、RS-232、或Ether-net。SPiiPlus Library支持32位元和64位元的操作系統(Windows ME,
Windows XP,Windows VISTA,Windows 7,Windows 8)。
ACS原廠網址: http://www.acsmotioncontrol.com